I can confirm the battery is still up and running! 
There is the editable pptx file in the first post so you can make your diagram without starting from scratch.
I can confirm the battery is still up and running!
There is the editable pptx file in the first post so you can make your diagram without starting from scratch.
I should’ve explained it better. This is the diagram for a 4S3P. The left side is showing 12 cells from the top. Right side is showing the same 12 cells from the bottom.
I’m planning to put 3X 4S3P in series to make a 12S3P.
 só I wired to charge only, I believe it’s right. I soldered a wire on the negative nickel strip to the b- and solder the charge port negative to p-. Both the positive from the vesc and the charge port go to positive on the battery.
só I wired to charge only, I believe it’s right. I soldered a wire on the negative nickel strip to the b- and solder the charge port negative to p-. Both the positive from the vesc and the charge port go to positive on the battery.
Can you guys double check this for me please
I may put this in it’s own question thread when I get my photos and stuff done, but for now -
Are there any advantages / disadvantages to which way round you mount the motors? eg either hanging out off the back of the board (behind the rear trucks), or slung underneath the tail of the board in front of the trucks.
Basically I’m considering making them go underneath, to make the board shorter and more discrete. But it also means less clearance for them, and it might mean having to raise the height of the deck for them to fit. Not sure how much clearance is needed.
TBH it’s heavily dependant on circumstances and preference…in theory the best is to front mount under the deck with risers but there no right answer
If clearance will be an issue then reverse mount it, if you need the kicktail then forward mount it, assuming you prefer the rear drive
I mean I don’t currently have a preference for front or rear drive, as I haven’t tested it, but it seemed like the consensus on here was rear drive is better so I thought I’d start with that as the plan. Am I wrong on this?
I’m using bergmeister wheels, so I have big wheels which helps with clearance. But I’m also using a drop through deck, and currently it’s actually being mounted that way. However I can easily change to top-mounting the trucks to gain more clearance.
However I do know that having the deck lower helps with stability, so I’m trying to come up with a good balance. Probably will take some trial and error, but I figured it wouldn’t hurt to get some suggestions and feedback on here before I start making the errors!
Both ways will work the same good. It’s all about clearance and deck shape. So what ever fit better for your case is the way to go.
First thing if you are talking about actual front wheel drive then it will give you a better hill climb ability but less traction in the wet. Also braking in the wet is very hairy. In the dry however it will give you more stopping power but this also can be a bit too much. I have only every used a front drive board with urethane though. One thing to consider too is if the board locks a motor then you are flying whether you like it or not. Sometimes with rear drive if one wheel locks you can ride it out. Rear drive reverse mount if you want to mount the trucks drop through because you will be able to lift your motors enough to clear the deck in most cases.
So I assembled my first board and gave it a try. It seems incredibly slow, even on flat surface on full throttle. What could be the cause of this? I am a 73 KG rider, with a single 6355 170kv, 10s2p Samsung 30Q and 36 / 15 gearing.
My vesc settings are:
60A and -60A motor.
Battery max 40A.
Aside from the slow speed, it also had major problems climbing even the smallest incline. However braking was strong and worked very well on all speeds.
The reasons I could think of:
The battery was really low and therefore could barely supply any power.
My soldering job on the XT90 connector from the vesc to the battery is bad, which results in it not being able to deliver enough power.
Since the vesc is single, it gets overheated and therefore goes in a sort of cooldown mode. However I rode about 10 minutes, so this is not so likely.
If you need any more info, to help me figure out the problem. Please let me know.
No, that’s wrong. The charge port lead needs to go to C-, not P-.
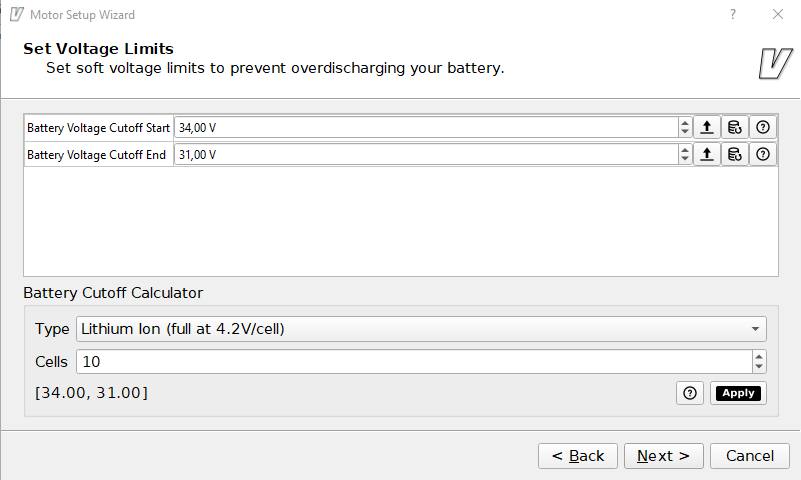
Post screenshots of your vesc tool configuration pages. I’d wager you’ve set your cutoff voltages wrong or something.
I can’t find an answer. Does it matter, which motor wire connects with which motor wire? Or can I just randomly connect those 3?
I have a high discharge BMS, does this change anything?
Hmm, those don’t look too bad. What voltage was the battery at when you did your test runs?
Connect them up any which way, do your motor detections etc, then test it. If it spins the wrong way, swap two wires - doesn’t matter which two.
I talked to the guy I bought the parts from. Turns out the battery came at 34V when I received it, which explains why it went so slow. I will charge up the battery and do another test.
Yep, there’s your problem. Storage charge.
What do when a DIYE Boards ESC starts to die? The acceleration is hella weak and it keeps cutting for a pulse, and it makes a loud grinding noise occasionally. I’d imagine its not the motors since it can still run smooth occasionally
Buy an ESC that’s not from DIYEboard. Also, check your other components. It may be a bad bearing, and the poor acceleration may be from that, or voltage sag from an unhappy battery pack.
Your symptoms exactly describe a low battery situation. Try charging the battery. With a low battery, you will still have killer brakes but your forward acceleration will be seriously lacking, until at some point you need to kick-push.