I would say that’s not gonna work out
1 Like

Thanks 
1 Like
Was worth a try 
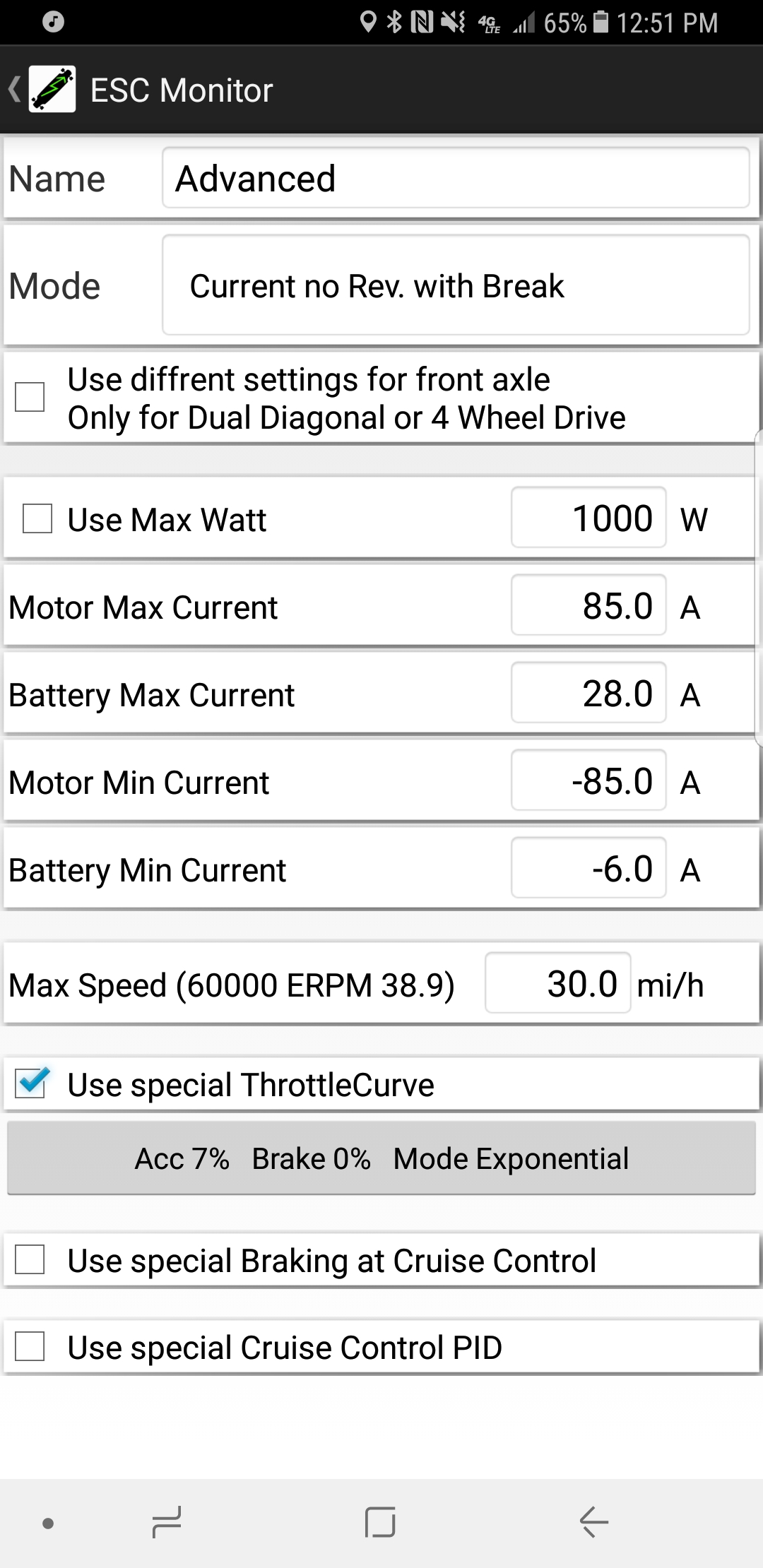
Could someone help me diagnose why one of my motors is stuttering when coasting? (No throttle, down hill). I am using master/slave dual focbox, dual bkb 6374 190kv (running one FOC sensored and the other FOC uncensored) , bkb 11s3p 30q, ackmaniac software and BT app. Here are some pictures, first one is the realtime data of the actual stutter, and the other is my settings.
So I am back with the motor problem. I just updated the VESC tool to the newest version. Did the new FOC detection and then got this message when doing the detection. Then I got this result:
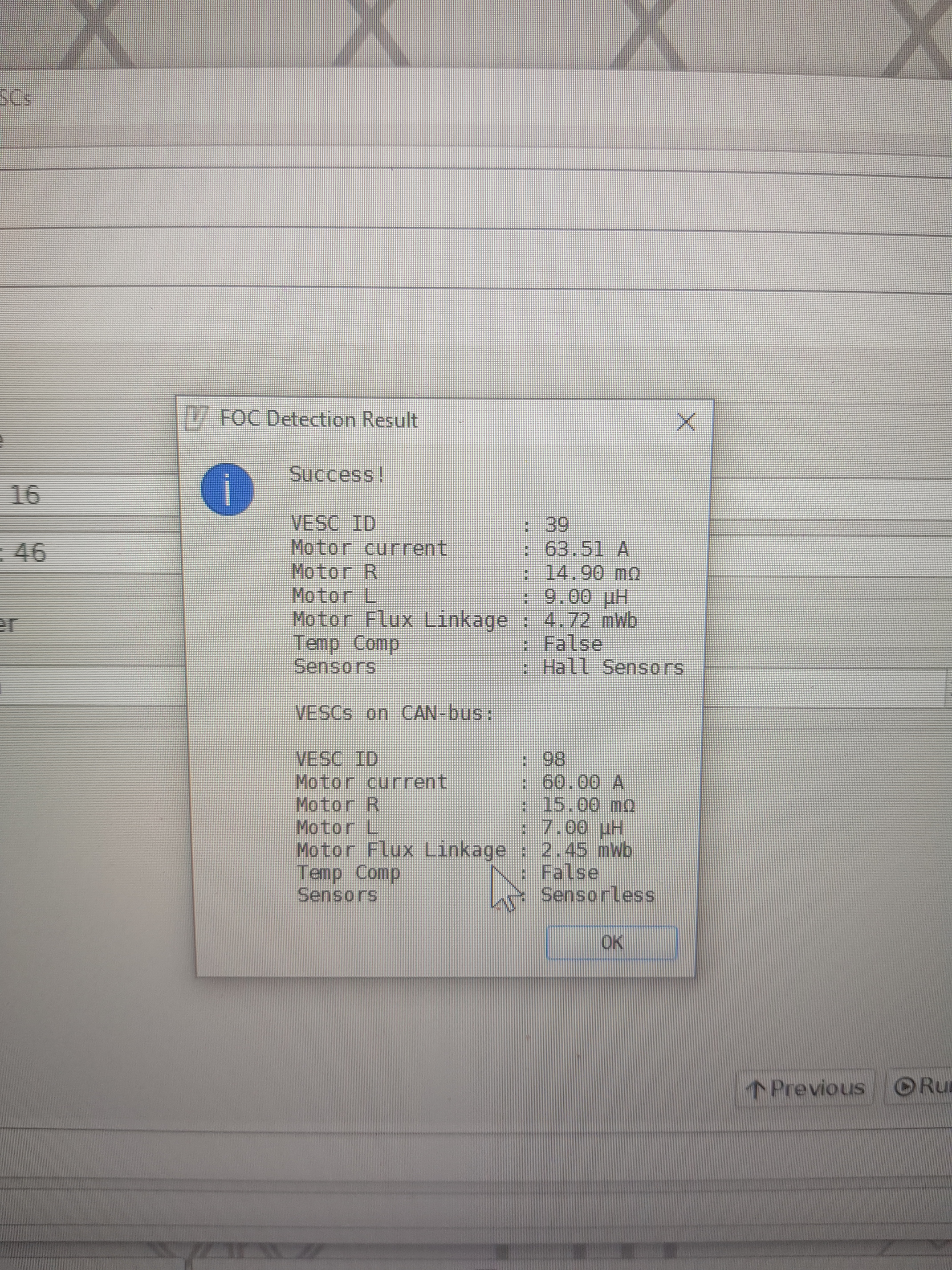
Then I switched connection between VESC`s. I did this because I saw that the 2 motors acted different in the detection. The result was also weird since both motors were wired up and the wires were intact and functioning. So I did a new detection with the other VESC connected. Then I got this result:
Flux linkage detection failed
Hopefully you guys can help me and maybe recognize this fault. I already reported this back to Torqueboards, and I am currently waiting on their response.
What do you mean by acted differently and switched connections between vesc? Were you doing motor config on one vesc and then switch to the other?
Might not make any difference but your vesc ID is 39 and 98 normally they are 0 and 1
Earlier in this thread I send a video where you could se a motor moving forward and backwards in a random order. This time the motor detection went quite similar to this. Normally you hear a big buzz in FOC then the motor will spin up and then it will spin slowly when its detecting the poles (I think thats what it does). This time I heard quite a silent buzz but that’s nothing to worry about. But it spun up quite some time after the other motor spun up. And it didn’t do the slowly turning detection back and forwards. So that was concerning to me.
About the first question you asked. Yes First I did the detection on one vesc. But the new VESC tool can do 2 defections at once. I first connected it to my main VESC with the metr module and remote. After having done the detection there I switched to the other VESC and did the detection there.
So I guessed this one right.
But it says that it’s for LiFePO4…
Hello,
Can anyone check this parts list I made? I’m still looking into the parts, but I think I’m pretty close. Maybe some of you can help me steer in the right direction.
Thanks!
Looks good. But I would recommend Samsung 30q cells. They have a higher discharge and capacity (I believe)…
2 Likes
Thank you for your reply! I looked into that, but it looks like it’s the other way around.
The 25R’s I’m using looks to be 20A instead of 15A for the 30q’s. But the capacity of the 25R’s are a lot lower with 2500 vs 3000 mAh. If I want to get both I have to upgrade to a VTC6, which comes down to 100,- more. I did just spot this VTC5A on sale which is even cheaper than the 25R’s, is that worth it?
I don’t have any experience with VTc6 or VTC5A cells. But a lot of people on here are running 30q’s with 20A discharge and they work great…
1 Like
25Rs are more prone to voltage sag. This is the reason many here don’t use them. 30Qs is the current standard.
3 Likes
I would look at the 30Q or the HG2. I personally have the 30Q’s in my build
1 Like
30Qs are cheap and get the job done. For a first board, it’s better to go with something that’s known to be good.
Sincerely, someone who bought 1.5Ah cells
2 Likes
The only thing I was worried about was the amperage it could deliver. After a quick piece of napkin math I think it’s fine, but I’m not sure. Is my calculation correct?
Max battery amps = Cell max * Cells in serie = 15 * 12 = 180A FoxBox Unity = 160A sustained, 300A peak, so thats fine. BMS bypass, so that does not come into play. Max motor pull = amount of motors * max motor current = 2 * 85 = 165A 180A > 165A, meaning the battery does not bottleneck
@Mich21050 Where did you get the 30q’s with 20A discharge? I can’t find it. Or is this the practical limit?
@venom121212 Allright, that explains why they are not being used, thanks!
@briman05 Thanks for the suggestion, but the HG2’s are too expensive, and if my math checks out I can’t even make use of the extra amperage, I’ll probably stick the the 30q’s then.
1 Like
It’s the practical limit… ![]()
1 Like
Nope! Max battery amps are amps per cell * cells in parallel. Putting cells in series increases voltage, which lets your motor spin faster = higher top speed.
Also, at low speeds your ESC will convert the high voltage of your battery to lower voltage, and because the watts will be the same (ignoring small losses), at those low voltages you can still get a lot of motor current. Only thing impacting your startup acceleration will be the size of your motors. Max battery amps will determine how long / till what speed you can maintain that current for the acceleration.
P.S. It’s perfectly fine for the battery to be the bottleneck of the theoretical limits of the system. ![]()
3 Likes
Also, I’m running 85mm wheels, similar to your planned setup. I have motor limits set to 30A (so 60A in total), because more is too hard for me to safely handle when starting up 
1 Like
What charger to sort cells for a pack?
- Liitokala Lii-500 is alright?