



OK. Most is working, just want to be sure my settings are correct before I try to ride it.
Left off Sensor wires and kept it in sensor-less. Would like to run Sensor-ed FOC but I need to understand those settings first.
Thanks for the all the inspiration and help from the community, If it looks like I took an idea from someone, I did. None of the ideas I had for the board were mine originally, I just picked and chose what I thought would work. Again – this couldn’t have been possible without this forum. Sincerely, Thanks. 
Nice job looking really good!!!
Thanks!
Not to proud of the enclosure, except - - I made it! Really sloppy compared to others, but maybe that’ll get a redo. Again, thanks for bringing the parts together.
Do the motor detection correctly. You have to run the motor detection and afterwards you have to press the apply button. Then you have to press the “Write Configuration” Button. But you have to disbale the PPM control mode for that. Otherwise your remote would disturb the motor detection. maybe that was also the reason for the wrong hall sensor detection. Correct values in your case would be Integrator limit = 130 and BEMF Coupling = 900

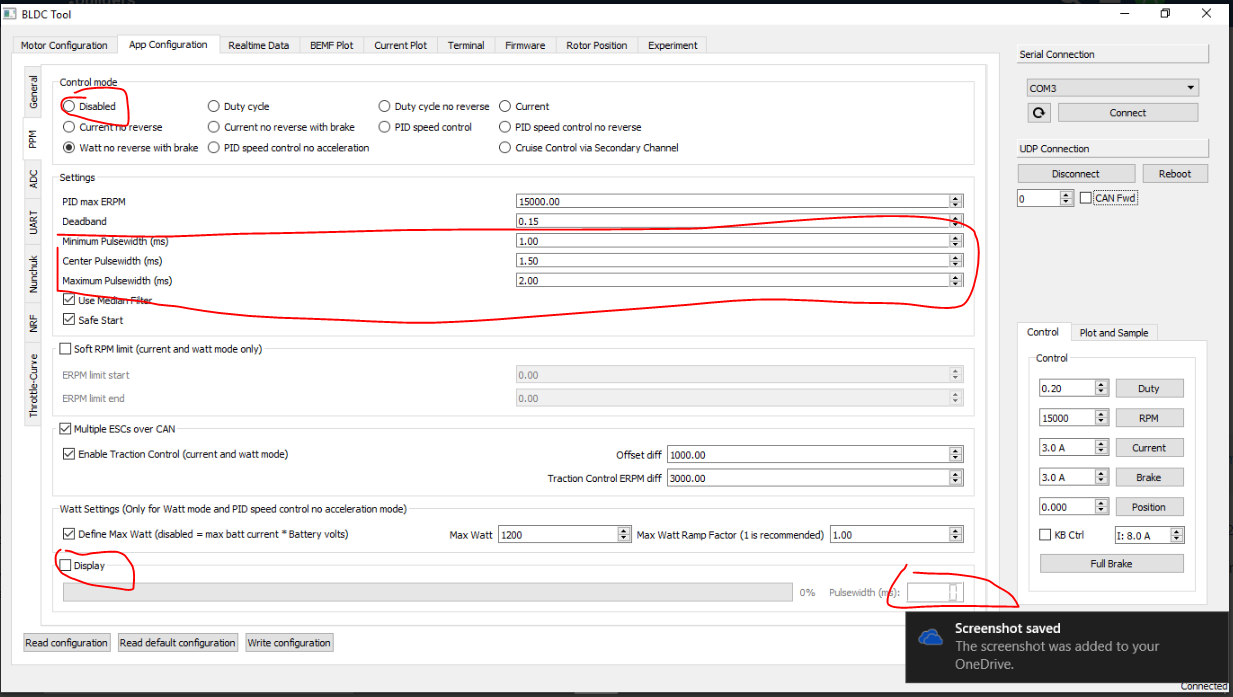
And your battery cutoff start and end is a bit too low for lipos. I recommend to strat the ctoff at 3,6V (8S * 3,6V = 28,8V) and set the end to 3,4V (8S * 3,4V = 27,2V) per cell. Li-ion batterys could go lower. And you should adjust your PPM Pulsewith settings. Because i don’t think that the standard ones are correct. First set the Control mode to disabled. Then active the Display checkbox. So you will see the PPM signal from your controller. Then set the center Pulsewidth to the value that stands there when you don’t touch the throttle on the remote. Then the minimum to the value when you brake fully and the maximum to the value when you give full throttle. Don’t forget to write these settings and activate the Watt control mode again.
Redid Motor Config : Integrator limit came to 127.17 and rounded down to 125. That OK? Also hall sensor detection failed. and wont spin in hybrid mode. changed back to sensor-less and unplugged h s wires.
PPM settings 
Is the Max Watt setting accurate for Dual Motors? (1200)
you have to calculate battery amps * battery S * 3,7V (3,6 for li-ion)
So in your case 25A * 8S * 3,7V = 740W
If you want it powerful then set your battery max for both vescs to 40A and set max watt to 1184W.
Oh man! That was awesome! Took my first ride to the truck to go to work. The skys cleared , beaming sunshine down on Texas for a maiden run in the 70°s (f).
I went with the low wattage setting, and soft limit the erpm to 35000 for now. (about 15mph / 25kph). Seriously, I don’t know how you guys are looking at 25mph+ boards. That’s seriously fast!
It was so sweet cruising up to the truck, right to the door, packing it up, and off to work. My dream come true!
Still looking for hall sensor help, but I’m on the road now and can’t adjust things fast/ take quick pictures, but I I’ll do what i can.
@Ackmaniac - moved to my build thread for clarity and not to muck up your thread –
No. I do not give full power. I only weigh 135 and that would put me on my butt. I am slowly getting more confidence to squeeze harder, but the added power is appreciated on hills. I definitely over-engineered my board. But with your firmware, I have tamed it until I can take full advantage.
The gearing is 13/36. I have 97mm wheels. With my weight, I figured there was enough torque but ability for speed. But it seems to stop at 21MPH no matter the settings. Maybe that’s the max for 8s?
Well according to the ESK8 calc, TOP speed is 23.07 18.46 weighted. So I guess I’m pretty close.
The reason for your topspeed is the 8S Battery. But you can modify your battery’s easily to a 12S with 6Ah. So you would get 50% more speed. But you should set the max ERPM in the motor settings to 60000 if you have 190kv motors or higher. You will not reach those ERPM’s on the street but on the bench. And you should switch off the “Limit ERPM with negative torque” to be safe. Because if you reach those speeds on the street you do not want to start braking. The VESC should simply don’t give any power anymore.

Thanks, and great info. I will probably rewire my batteries in the future, but for now 22mph is fast enough!! 
you’re in TX? where at? we should ride
Fort Worth, but I’m out of town A LOT. Where are you?
McKinney 
That’s not too bad, if I’m out that way I’ll hit you up. 
Even if not, we can meet in-between. I know a few other guys in the Dallas area that I could contact for a group ride.
I have finally figured out the sensor wires from the motors, and thanks to @Ackmaniac’s new update to the BLDC tool, I have set up FOC mode with sensors with the no-miss tool tips. Things are coming together for this hobby!!
Gotta go for a test drive!!
Aaaaaand… SUCCESS! Man that’s smooth. And super quiet!

