So, after a long ordeal with the manufacturer, I swapped the wheels out for regular 10" pneumatics. The 8" rubber wheels were nice enough on visual inspection, but I never got to use them for a number of reasons and moved on.
I need some more help please! I ordered a number of parts from www.diyeboard.com - good guys to work with, they helped swap some parts around with other customers in the US instead of paying for expensive shipping to China! - including this battery which came with charger: http://www.diyeboard.com/10s5p-18650-lithium-battery-pack-36v-10ah-360wh-p-460.html
However, I cant figure out how to connect the battery to the charger? I see the connectors are different, but Im totally unsure how to wire them up together. Ive searched and found info on building a loop key for charging, which I think I can do, but that is only part of the problem. Any help?
Also, Ive read somewhere that I shouldn’t program the VESC with the 10S battery, and need something with less amps… is that right? I bought two of the Torque VESCs which according to the product description come pre-booted and dont need the initial startup amp protections, but what about using the 10S battery for programming as well?
Thanks!
I would assume the open connector is for the power switch, but it may be the charge port. Either way, you can solder one into the XT60 connector.
Thanks! Im sure the connector is for the charge port, but Im not sure what you mean by “solder one into the XT60 connector” - is there a diagram somewhere that describes this?
Here’s my connector on the charger: https://photos.app.goo.gl/0NWFU0cxKnl0wOEd2
You need to get the female side for that charger and solder it onto the charge leads on the battery pack. Its probably a 5.5x2.1mm socket.
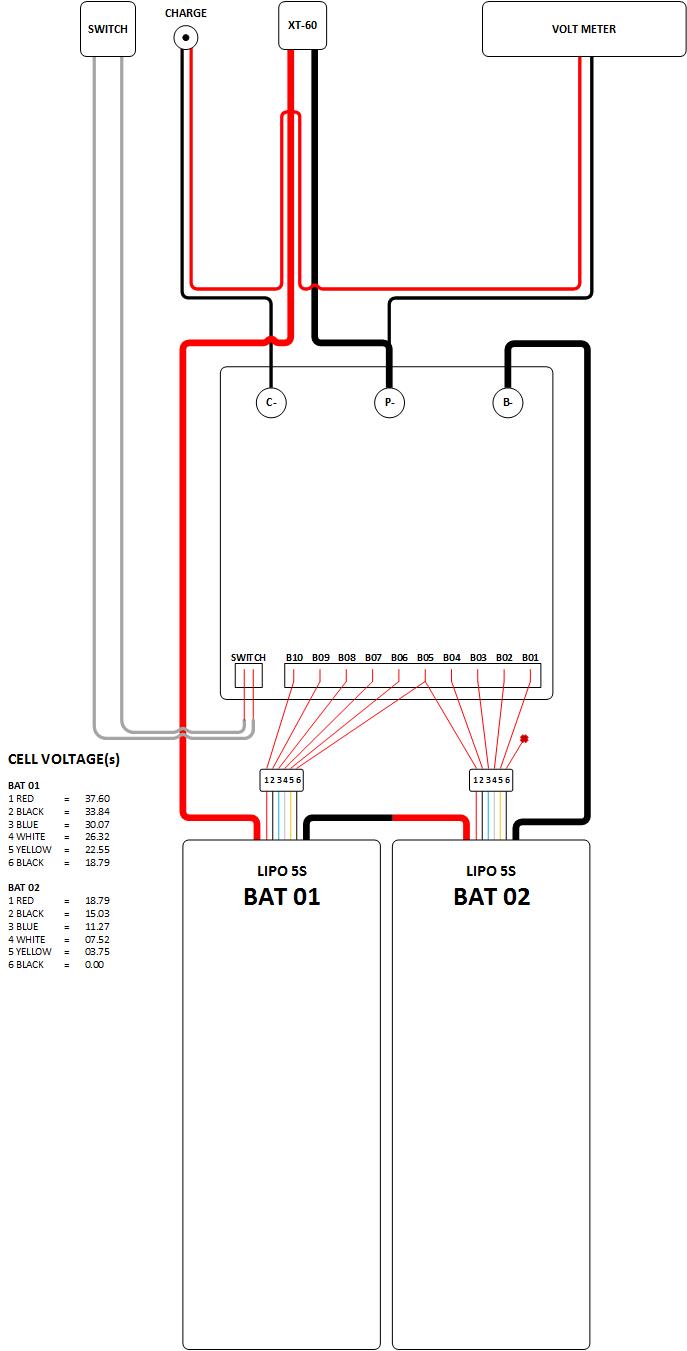
You can use this diagram for reference maybe.
1 Like
Update: Ive got the electronics sorted out and the VESC connected to the BLDC tool. It was a PITA figuring out how to get the BLDC tool to work in Windows, and I made a small post on how to do it in the FAQ section here: link
Motors I used, 2x of http://www.diyeboard.com/180kv-n6354-outrunner-motor-2000w-for-diy-electric-skateboard-p-540.html Battery http://www.diyeboard.com/10s5p-18650-lithium-battery-pack-36v-10ah-360wh-p-460.html
I can make the motors move, but they are moving a bit erratically. It seems like there isnt enough power getting to the motors, as the board will move without me standing on it but if I stand on it there isnt enough torque to move my weight.
Here’s my VESC settings:


Is there something blatantly incorrect in these settings? Any help appreciated!
Im concerned about the erpm settings given my motor KV, but I dont quite know what to do with them.
set it to 60k max. Your motors are not the best to work with 10s… they are too high
thanks for the advice! Ill set the max erpm to 60k. Do you have advice on the min erpm?
Yeah, I realize now that the 270kv motors were too high, but it’s what Ive got for now. I can upgrade to 12s later. What are the downsides of running higher KV motors on 10s? Can I mitigate the risks with VESC settings?
ACK, I posted the wrong motors… these are the ones I have: http://www.diyeboard.com/180kv-n6354-outrunner-motor-2000w-for-diy-electric-skateboard-p-540.html (180KV). I had originally ordered the 270kv motors but returned them because of this reason.
Cough use sam. 30Q Cough Uh you would want those in parallel which would then give you ~18miles(9 miles is just not enough). Use 12s if you want higher speed potential. And remember more packs = more range. Arrangements don’t matter.
Cough use sam. 30Q Cough
Sorry, but Im not sure what this means?
I also went with the 10S battery already, so no need to revisit that decision for now ![]()
Samsung 30Q’s are 18650 lion cells. Compared to lipos’, they have lower capacity degradation, safer, and cheaper(for the long run). The only draw back is voltage sag which can be remedied by using bigger parallel blocks. If you ever need to replace your lipos’ think 18650 packs first. 
Thanks, but Im still confused: the battery I bought is made of 50 cells of 18650s: http://www.diyeboard.com/10s5p-18650-lithium-battery-pack-36v-10ah-360wh-p-460.html
I dont actually know how many cell packs that is though, and it’s not listed on their site. Ive asked but yet to receive a response
Im getting closer, but struggling with the VESC set up. I am able to spin both motors when the board is not under load (when Im not standing on it), but when I do stand on it the motors feel like they are “shuttering” for lack of a better term.
Also, my realtime data graph looks like this:

I feel like this is abnormal - anyone have an idea what settings are incorrect which are causing this behavior?
Thanks!
You mean you just stand on the board and expect it to go? You gotta give it a push in the right direction, otherwise you’ll expirence cogging
Oh damn, no way. I just assumed… sigh. I have limited space in my current workroom so Im not able to do that in here, which is why I didnt think of it. Ill have to take it outside and give a try, strapping down the components for now until I build an enclosure.
Any thoughts on the graph data?
Yeah, that worked alright… a little nudge and the board went flying out from under me and left me on my ass! It seems like its going 0 - 100 instantly
Yup, its an art to get goin slowly! From my understanding you need to make it a sensored motor to get the cogging to atleast be mitigated. I have sensors I need to put on this weekend to try that out. Basically wothout the sensors, it doesn’t know that the motor issn’t spinning so it doesn’t ramp up the power to get you initially moving.
Annnnd I think I somehow just fried a VESC… isnt responding to power like the other one or as it was a few minutes ago… shit.