So the time has come for some changes. One of my biggest pet peeves is getting debris stuck in a belt tooth. While this has never really been an issue on my slower carve decks. It can really throw off my concentration on the road when going 30mph and tiny pebble or debris gets stuck in a tooth, causing the most distracting oscillation of the drive system from not spinning completely free.
I’ve used the motor pulley covers that @Apolo designed for me, and they have been great, but the soft aluminum of the metroboard pulleys just grabs debris no matter what. 90% of the time I would say metroboard pulleys are one of the best options because they are press in, and the width allows you to run 20mm belts super loose without an idler and no skipping of the belt.
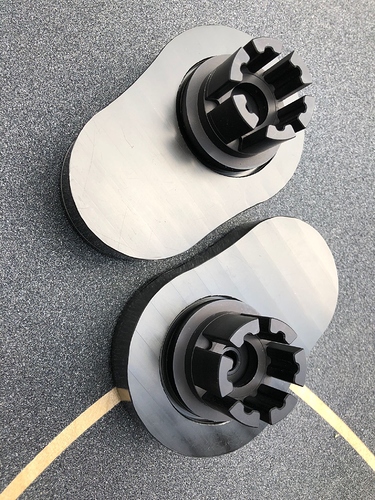
Anyway because of this I asked @Kug3lis to design a gearbox for 218s & 107s
And he has.
One of the first kits will be arriving soon, which I will be swapping over too.
This also is going to be a good opportunity for me to disassemble my motors for cleaning, and bearing refresh. Which I will make sure to take pictures of and show how to properly regrease sealed motor bearings(not oil).
Looks wise, I don’t think it will change much. Sound wise, will be all about setting the proper gear mesh, with lubrication.
I think the real tests will be, can it freewheel out-roll my loose ass 20mm belt setup. Which if the backlash on the Spurs is setup correctly, it should easily out-roll the belt setup.
It probably will. The difference between my trampa with direct drive and @laurnts trampa with belt was really noticeable. Much more ‘freewheel’ on the directdrive
Direct drive and hub always have the least friction, so it’s smoother on rolling distance. Direct drive needs to have helical gear setup to minimize backlash and noise.
Yet I still like my belt setup for eATB although replacing belt when snapped suck balls
I tend to agree. But I’ve not seen anyone else running 20mm belts like this Evo & pshaw Evo. Our belts are so loose it’s almost all motor resistance. Pushing my Evo with belts off I can one push 29ft, with belts on is around 26-27ft. When I used 9, 12, or 15mm belts on other builds where the belt had to be tight to not skip, it was less then half of the distance of when belts weren’t installed.
So I’m really hoping the DD are basically the equivalent or better then wide as hell loose goosey belts
I run 25mm belts in my Evo, soon to be Bludgeon. Very very loose, but still lots of freewheel friction. My Evo galcon with gear drive freewheels much better…but I ain’t pushing, if I break down I either walk or Uber .
Hahaha yeah same here… I mostly mean freewheeling for riding. Not always having to be on the throttle. The worst is when your belts are so tight that you have to use throttle to go down a hill… Hahaha never again @mmaner
I just don’t know a more natural way to test freewheel other than a single push distance test…
PS it’s still an evo with wide belts, guess only Evo owners go wide lol…
I can’t wait to see same 13s action with gears… It should accelerate way much more compared to belts… MAYBE he will reach speed of light and @Deckoz will leave this universe like Barry Allen
OKAY PEOPLE. I SAY WE DO A “DECKOZ CHALLENGE”
Take videos of you zooming off in an epic fashion and post them in the “no words” thread. and hashtag it #deckozchallenge.
Let’s see some cool zooms.
@Deckoz bless this idea