Hey guys, Ive kinda skimmed through this thread for help setting up unity with hoyt remote. Noticed some of you had issues, but never really saw a solution. Ive only tried setting it up with the UI version on android. The problem I am having is when I push the throttle just about halfway, one of the motors starts slowing down until it just stops completely. Its weird because when I go full throttle, both motors spin perfectly fine. Would appreciate any help! Thanks
Sometimes one motor can have a bit more drag than the other. Shouldn’t happen at half throttle probably, you ran the calibration routine with the latest app? I think I have patched those issues in the UI out. A screenshot of the results on the remote calibration screen would be helpful. Have you tried riding it at all?
Anyone else having random cutouts during a hard acceleration after a slight rolling acceleration? I’m on Fw 23.43 on 8inch pneumatics, 70/-70 motor, 60/-30 battery, 12s8p 30q’s. It happens once or twice on a 13 mile ride, doesn’t happen during the high speed constant, just during hard acceleration after a little roll 5% of the time. Not enough to complain about but enough to ask if anyone else is having this issue.
2 Likes
Sensored? Try tuning your sensorless erpm maybe?
Yeah its weird, Ive tried re-calibrating it many times and same issue. I have tried riding it and well it seems okay, but you wont really notice one motor going out since the other motor is doing all the work. I noticed this issue when lifting the wheels. 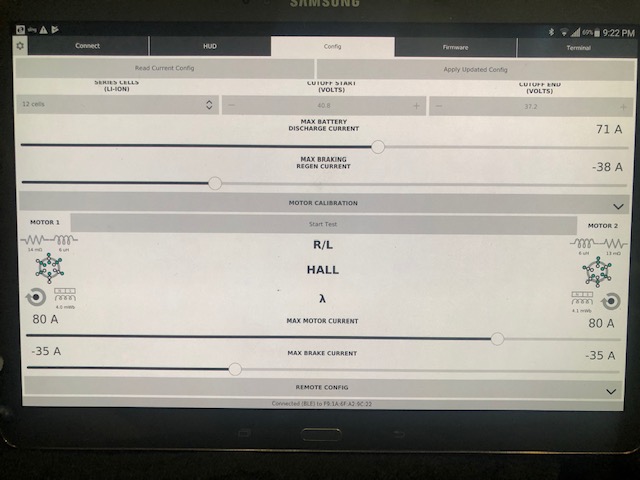
1 Like
Sensored, dual bkb 6374 190kv on a 1:4 kaly gear drive reduction. It’s not a stuttering issue, that was resolved with the firmware, it literally cuts out and then after I regain my balls after my bindings save me its back on running normal. I’ll try tuning the erpm next time I take it apart but thought that was for stuttering. This was with just the standard fw running guided setup except for changing the battery and motor values.
Hey guys. My unity started going ghost mode and accelerating on it own with the remote connected and not connected. This started happening right when my power button wires got messed up and lost their solder connection, leaving them connected only through shrink wrap. I resoldered them and the board hasn’t done it again. Could these be connected or it is just a coincidence? What else should I check to make sure my board doesn’t kill me? I use the nano remote btw.
1 Like
Check the Remote config tab of your Unity using FOCBOX UI and check the pulsewidth showing 0 or not?
@jmoji this probably isn’t related to the hoytt remote at all. To me it just looks like one of your drives has a bit more friction than the other. Notice on the app the amps to the left and right motor, it’s like under 1 amp. This is effectively the torque being applied to the motors with some scaling applied and 1 amp is not much torque at all. So a slight difference in friction on each side could cause a large speed difference but shouldn’t cause a noticable difference/problem while riding when your applying 30 amps instead of 1. You can also see the left motor comes to a stop immediatley while the right glides out. You might want to look for friction in the gearing of the left wheel, how does it feel with hand spinning each side in backdrive? Any noticable difference? Might also be worth noting here that the UI of left vs. right motor here is mirrored for your setup here. The left data is for the right wheel and vice versa.
You can also turn on traction control in the advanced tab of remote settings and it should make your wheels behave more in sync on the bench like this.
@jackluis check the integrity of your reciever wires (red white black servo cable) and make sure you have good reciever placement. Sometimes the crimps on those can get loose/damaged if yanked. Make sure the 3 pin plug on the reciever is glued/affixed in place so it can’t jiggle. The power switch doesn’t have any control over the boards acceleration/deceleration and even if a false shutdown command were sent over the board would continue to behave as normal until you came to a stop.
The only way it could have impact is some kind of crazy rf interference which seems unlikely to me.
@ninTHIENdo can you run the faults command from the terminal after you trigger the behavior? It’s possible that the sensorless transition doesn’t happen smoothly causing a current spike that triggers an overcurrent fault. Luckily this only occurs at that low speed transition from sensored to sensorless driving if that’s the cause, but I’ve found that tweaking the transition rpm can fix this issue sometimes. Can you share a screenshot of your motor config values from the app?
Can you help me tune my throttle curve? I’ve tried a bunch of different ways, but it seems that the motors don’t even kick in until 20% throttle and then from 35% to 100% has no change, it is just constant top speed.
If this is on bench testing then I’d not worry about it. Think of the throttle as the gas pedal in your car and bench testing as putting your car in neutral. Even if you just slightly touch the gas pedal in neutral it revs your engine to max rpm. Fixing the initial lack of response is due to a property called deadzone, I forgot to add it in the app last release as I planned, but you can still tune it down from the full tool. By default it is set to 15%, this can be tuned down if you calibrate your remote well.
Yeah that makes sense, but you probably cant see I still have the throttle pushing forward when the right motor goes out. That just doesn’t make sense to me. I would understand if I let go of the throttle, one might slow down faster than the other and thats fine. My issue is the right motor cutting off even if I still have medium throttle on it. Hand spinning the motors feels pretty much the same for each. I will play around with the traction control to see if that changes anything.
1 Like
@Deodand Traction control did the trick! Both motors run how they are supposed to now! Thanks Jeff!
1 Like
Well I mean the motors don’t even move till I’m a quarter way up the throttle and then they just seem to go full speed with no precision control after engaging.
Haha. Enough to put me here that’s for sure 

6 Likes
Dude. I have the exact same setup as you do (6374 bkb 190kv motors with 4:1 gear ratio and 8” pneumatics) no bindings  and I’m having the same exact issue with my shit. Damn. I hope enertion can help us fix this problem because kissing asphalt is not a good thing!!
and I’m having the same exact issue with my shit. Damn. I hope enertion can help us fix this problem because kissing asphalt is not a good thing!!
I never had that issue when I was running 6374 170kv maytechs. Any help would be highly appreciated
1 Like
Damn. I guess I’m not the only one with bad luck. Here is my other unity With this one I get nasty wobbles when reach top speed on my board on maytech 6374s 170kv motors. It basically throws me off balance if I go over 35mph
1 Like