My name is Lennert and i am part of a team of engineering students (We study mechanical engineering: robotics and mechatronics) assigned with the task to build an electric longboard.
We didn’t get any specific tasks so we had to think of some original control ideas ourselves, here is what we came up with: (if you have any suggestions, leave them in the comments!)
normal RC remote operation
weight sensing operation
maximum acceleration based on weight distribution (compensator with force setpoint on front truck)
maximum deceleration based on weight distribution
active speed wobble suppression
torque vectoring curve assist
alot more
We have currently designed all mechanical parts and are in the process of making them.
We are currently working on the weight sensing of the board.
You basically have 3 options here: strain gauges in a wheatstone bridge, load cells or force sensitive resistors.
We chose for the strain gauges approach since it doesn’t require your feet to be on some kind of pads like the Zboard does, and integrates the sensors into your trucks.
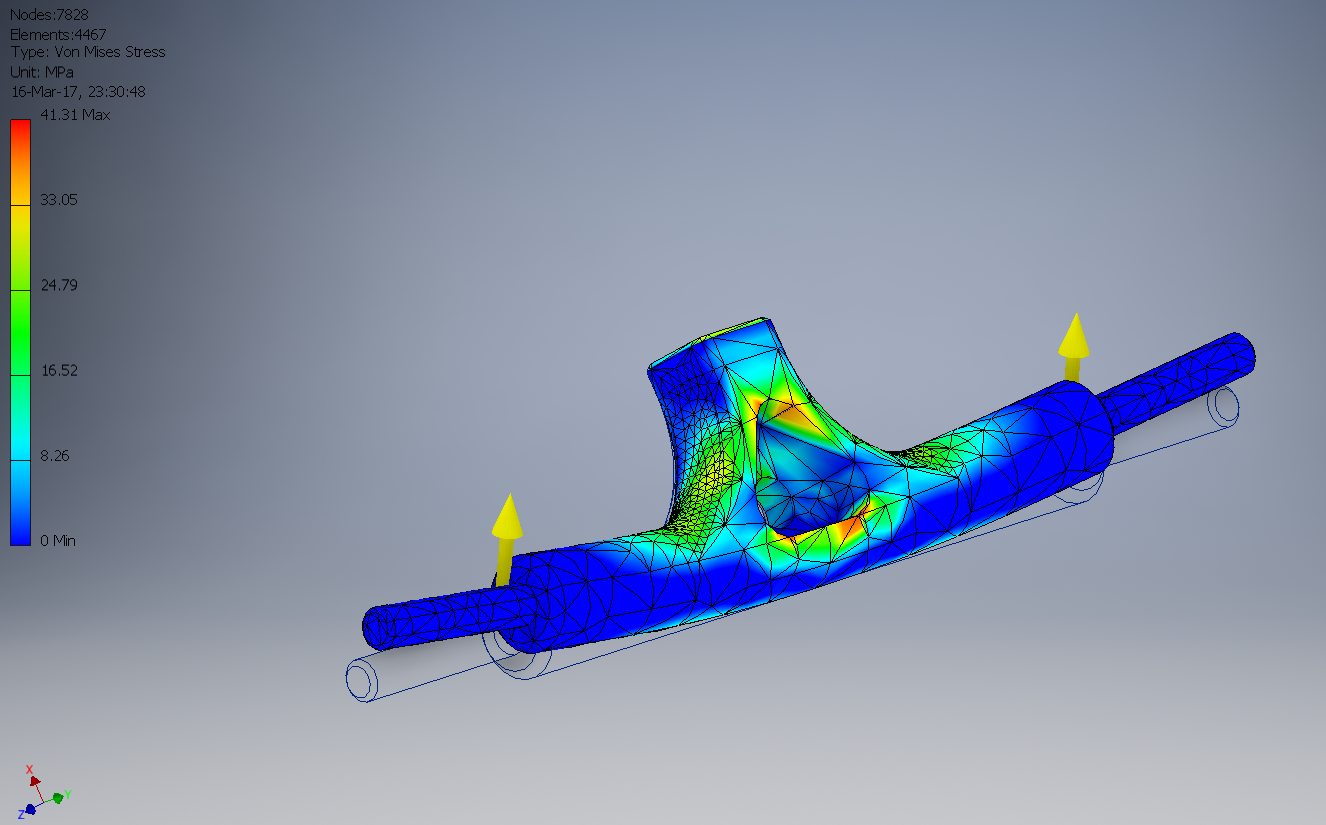
To determine where to place the strain gauges we did an FEM simulation to determine the locations of maximum tension and compression.
We use a HX711 load cell amplifier and an arduino to read out the wheatstone bridge:
As you can see, we have a good resolution. This data will have to be filtered using a LPF to filter out process noise such as bumps in the road. Measurement noise is pretty low.
We still have a lot to do, and i will update regularly
sounds cool!
If you go weight sensored, think about an proper algorithm to get rid of sudden acceleration or brakes when you go over stuff. I saw a dude playing around with that kind of thinks and he had an accident going over a rock - board accelerated due to high compression in the sensors and he does some cool aerial flips before the street catched him softly with his face
You could make it so the sensor is about the size of a foot versus a small circular pressure pad.
And carving would somewhat cause a misrepresentation so maybe the board would have to recognize what position or angle its at.
I know if I’m carving hard at higher speeds, there’s definitely an increase in pressure and not a time when I would want to accelerate or brake. Also, you would need some way to tell the difference between landing on your rear or front truck and leaning to brake or accelerate.
Yes, that’s what i meant when i said low pass filtering (simple running average/weighted average or even more advanced LPF filters). We will filter out the high frequency noise such as bumps in the road so only the “slower” components of the signal will pass. A bumpy road will be a few Hz at least, and you choosing to go faster or slower will be very slow in comparison
Got some more done today:
cleaned up the trucks by wrapping them to protect the cables and especially the strain gauges.
Here is a picture of the strain gauges on the surface (this was our test piece, the rest of them are cleaner)
We then applied known weight on the trucks so we can actually use the values coming from our wheatstone bridge. This is because the gauges have a ±5% tolerance so no 2 bridges are equal. We then solved a least squares problem to obtain sensor value in function of weight. After which we calculated the inverse so we can have weight in function of sensor value and interpolate between datapoints
I am not really familiar with longboards, so i even had to look up what this carving technique is exactly. But as i understand it’s just fast turning while shifting your weight to the side ?
You said it yourself - shifting weight. Since your sensor is basically just measuring weight this might be an issue. Also turning requires uneven distribution on the wheels (inner wheel gets pushed down harder) - can you filter this?
The sensor measures the deformation of the trucks. We will not be using any absolute values, only relative forces between the trucks will be considered (how much % of my weight is on the front/back). As long as both the front and rear trucks are loaded/bent asymmetrically, it should still be fine. But we will have to test this for sure If this doesn’t work, an accelerometer could be used to determine whether or not we are cornering (sideways G’) and adjust readings accordingly. We could also use speed measurements of the wheels to determine this, since the outer wheels should be turning faster. Our professor wants the focus of the project in signal analysis and software/algorithms, and not so much on the mechanical design. Thanks for the insight!
Defenatly sounds like a fun project I would suggest a delay in the response from the sensors so that it takes out the outliers such as sudden rocks and body weight shifts and average it out to a gradual change that won’t result in loss of control
by all means, really, with no offense to you and all my respect for your project: get a longboard and learn to skate first. even pushing a few days on the flat ground. it´s ok for the start.
then get a cheap e-board and see what they do, how they perform.
THEN think of improving these objects.
to me this sounds like somebody wants to make a revolution in F1-engines but doesn´t know about cars at all.
(“I heard they are fast and people have fun with them…”)
Yes, we will use digital low pass filtering to remove the bumps in the road etc.
How exactly the weight distribution will control the speed of the board is yet unknown.
Well, we were assigned this project by the university, we are good engineering students… but no pro skaters
We also can’t just buy a working board for this project, since it would kind of defeat the purpose of designing one as an exercise in engineering. I have to admit some experience on the board would help out a lot, but i personally don’t expect is to be too difficult to learn. I will certainly consider riding it non motorized for some time to get the hang of it Thanks for your input!
Also something to think about is pushing and foot braking. Times when your weight is on a single foot mainly over your front truck.
Basic scenario. You’re stopped at an intersection in back of a car. Car makes a right and you need to move forward a few feet. You manually push with your back foot and balance your weight on your front until you want to stop, at which point you foot brake.
There are quite a few situations where pushing comes into play on electrics. Sometimes it’s a crowded intersection, other times it’s when you’re passing by a cop, or you just need to save on battery power.
When it comes to pushing, keep in mind that most people push with their rear foot, but a few people are mongo where they push with their front foot balancing their weight over the rear truck.







 If this doesn’t work, an accelerometer could be used to determine whether or not we are cornering (sideways G’) and adjust readings accordingly. We could also use speed measurements of the wheels to determine this, since the outer wheels should be turning faster. Our professor wants the focus of the project in signal analysis and software/algorithms, and not so much on the mechanical design. Thanks for the insight!
If this doesn’t work, an accelerometer could be used to determine whether or not we are cornering (sideways G’) and adjust readings accordingly. We could also use speed measurements of the wheels to determine this, since the outer wheels should be turning faster. Our professor wants the focus of the project in signal analysis and software/algorithms, and not so much on the mechanical design. Thanks for the insight!