I see, i’ll try it out and see if it works. Thank you Nico! Another question, i’m using the nano-x remote and the acceleration and braking is quite strong, more evidently on braking. It’s so hard that i had to test it out while sitting on my board, even with 25% each on the throttle curve. Is there another way to make it smoother via the VESC program?
Just reduce the motor max amps to have less torque.
1 Like
Dial the braking current down to about 20A, see how it feels.
How are those Motors working out for you? I’m just starting a dual build.
My motor settings are at 20a i think haha.
Well one thing’s for sure, these are really strong. I’ve yet to bring it out for a proper ride yet so i can’t give a verdict. Good thing about @torqueboards motors is that it comes with a slot for the keyway, and with sensor wires.
It’s looking nice, I am curious to see the final result. One question, what did you use to paint the metal. It looks really nice and I am think to do the same on same part of my board. Thx!
Edit: part of my sentence got deleted before post it.
I used this paint from Rustoleum. The final surface more of a semi gloss actually. What i did to get the hammered look is to spray one coat normally, let it dry for a couple hours, and then spray one light coat about two feet away. The light mist makes the hammered surface. But you can skip that if you just want it black.

2 Likes
Cool thx! Did you use a primer first?
Nope, i sprayed this right on the bare aluminum. I did wipe it down with a solvent to get rid of any possible oil or dust.
1 Like
Got it thx!
I need to do this with mines. Yesterday my bearing broke from the idle
My motor settings are at 20a i think haha.
Hmm, well I am running 4" rubber tires, so maybe 10A?
Yep i set it to 10A last night. It feels softer when testing it at home, sitting down on the board  I’ll go for a test ride later today, i’ll let you all know how it goes!
I’ll go for a test ride later today, i’ll let you all know how it goes!
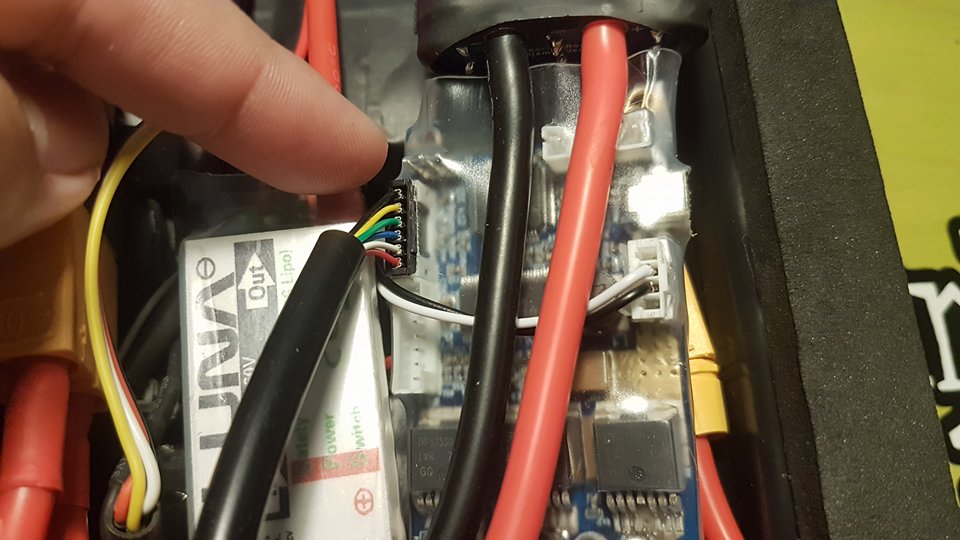
Apparently i can’t get one of the motors to run sensored. When running a motor detection for one of them, as usual it will disconnect from the computer. I switched VESCS and the same thing happened. So i’m certain it’s the motor that is causing it, not the VESC. And this occurs when i have the sensor wires plugged in. When i remove the sensor wire, it can be connected to the computer again. Does anyone have a similar problem like this on TB motors?
is i plugged into the right port? pics plz
I have better luck on FOC Sensored vs anything else.
what are the wire covers called you use covering your motor phase wires? nice build
Update after a first proper test ride
I rode on a 15km route, and my battery was at 55% after all that. I’m impressed with the range. I wasn’t able to get it to run sensored, but thanks to the idler motor mounts i got from @marcmt88, the belts were looser and hence i was able to kick push it easily. My threaded inserts have not arrived yet so i taped the enclosure to the board three layers, three times.
I set the braking power to be -10A, and turns out it is a little weak after all. It was able to brake decently but it doesn’t come to a complete stop, i had to hop off or stop the board with my front foot. I will set the braking power to -20A and try it out again.

1 Like
One issue after another haha. After getting the settings done for everything, the remote can’t seem to sync up with the board.
I’m using Enertion’s Nano-x and usually when i turn it on, the green light will be solid. This time, it blinks twice. Nothing showed up when i searched around the forums and the web so i’m asking if anyone knows what happens or how to solve it.
It goes in the connector that under the red cable
1 Like