I got my Honey Driver build finished recently but am having an issue with the motor stuttering when I go full throttle from standstill or if I otherwise accelerate too quickly. Any help on this would be appreciated! Details below…
I think the BMS should be able to handle burst current. I’m not confident this is the issue since the board never cuts out, just stutters on dead stop hard acceleration. Note in the video I release throttle just to show the issue; if I held the throttle it would eventually get up to speed and travel smoothly.
Is the problem only occurring when you stuff the throttle? Does it behave when you gradually apply the throttle?
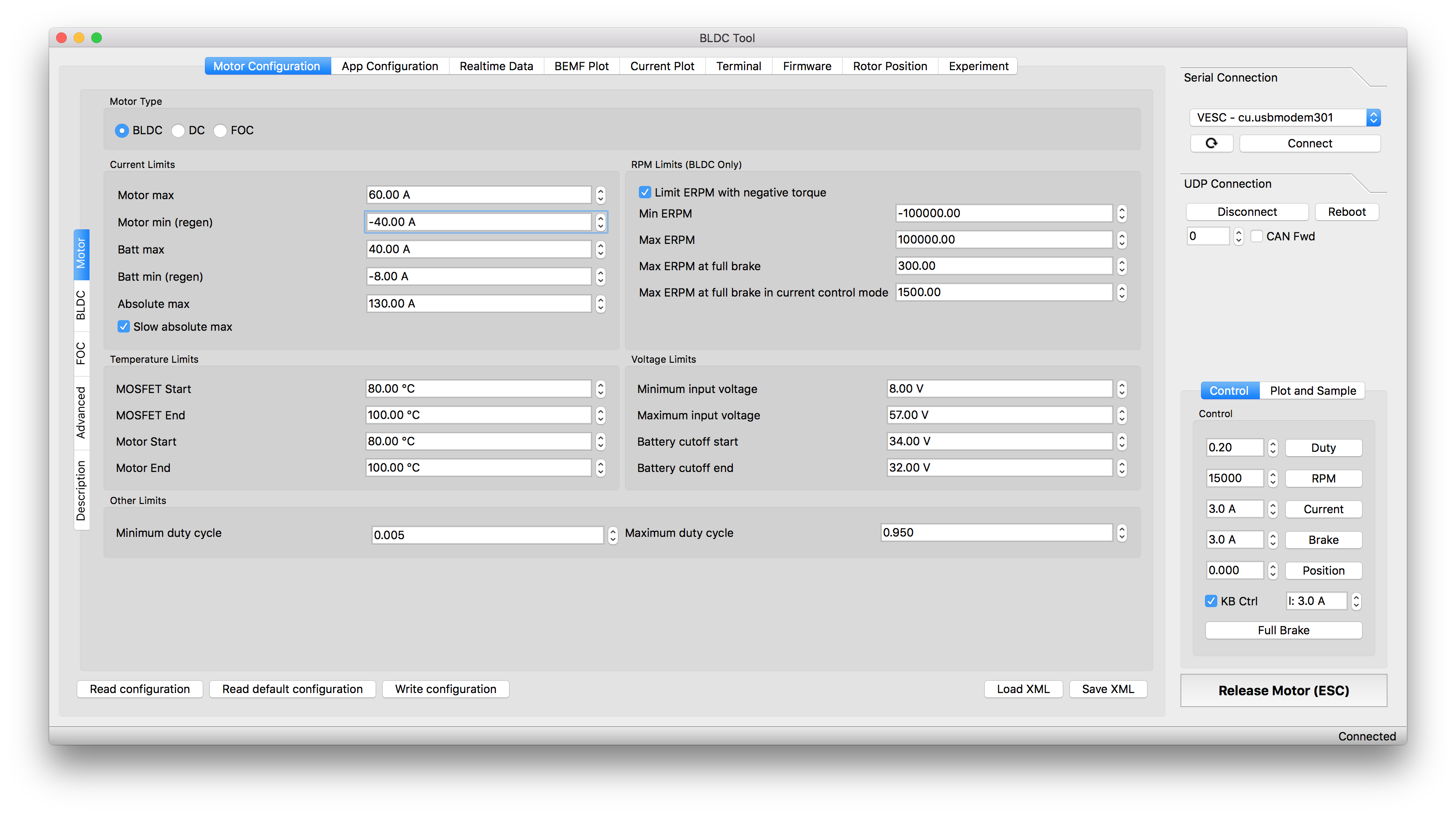
FYI, I can trip the over-current on a bms with 100 amp capability with the setting you currently have. I am pretty sure the bms you have is not capable of 100 amps.
This is one of the main reasons I use 60+ cells in my builds. You really only want to pull a maximum of 10 amps from those cells regardless of their 20 amp rating. Try lowering your settings to 20 amp battery and 30 amp motor max. Personally I think that is still to high for a 40 cell pack but it should work with fresh cells.
Ideally we would only pull a maximum of 5 amps per cell but that requires a very large pack.
Here’s what vedder said about the option. I noticed he mentioned that send status should be on slave, but made no mention on how"multiple escs over can"should be configured. I was assuming it’s okay to have it on all VESCs.
Multiple ESCs over CAN can be enabled to connect several VESCs over CAN bus. All VESCs must have different Controller ID and the slave VESCs must have Send status over CAN enabled
Thanks for the recommendation @chaka. I’ll take note of those settings. However, I do go up pretty steep hills with no problems. I have a hunch that this is a sensor issue, but haven’t tried running the setup in sensorless yet.
The slave always takes the commands from the master and traction control will work. So, if it’s enabled at the master that’s ok. But it should definitely not be enabled on the slave.
Update! https://goo.gl/photos/Lyt73DdMZoMXDsVe8@elkick@chaka
I explained in the video, but the problem seems to be less severe and less likely to throw me off now. It still happens if I crank to full/near full throttle too fast from a dead stop.
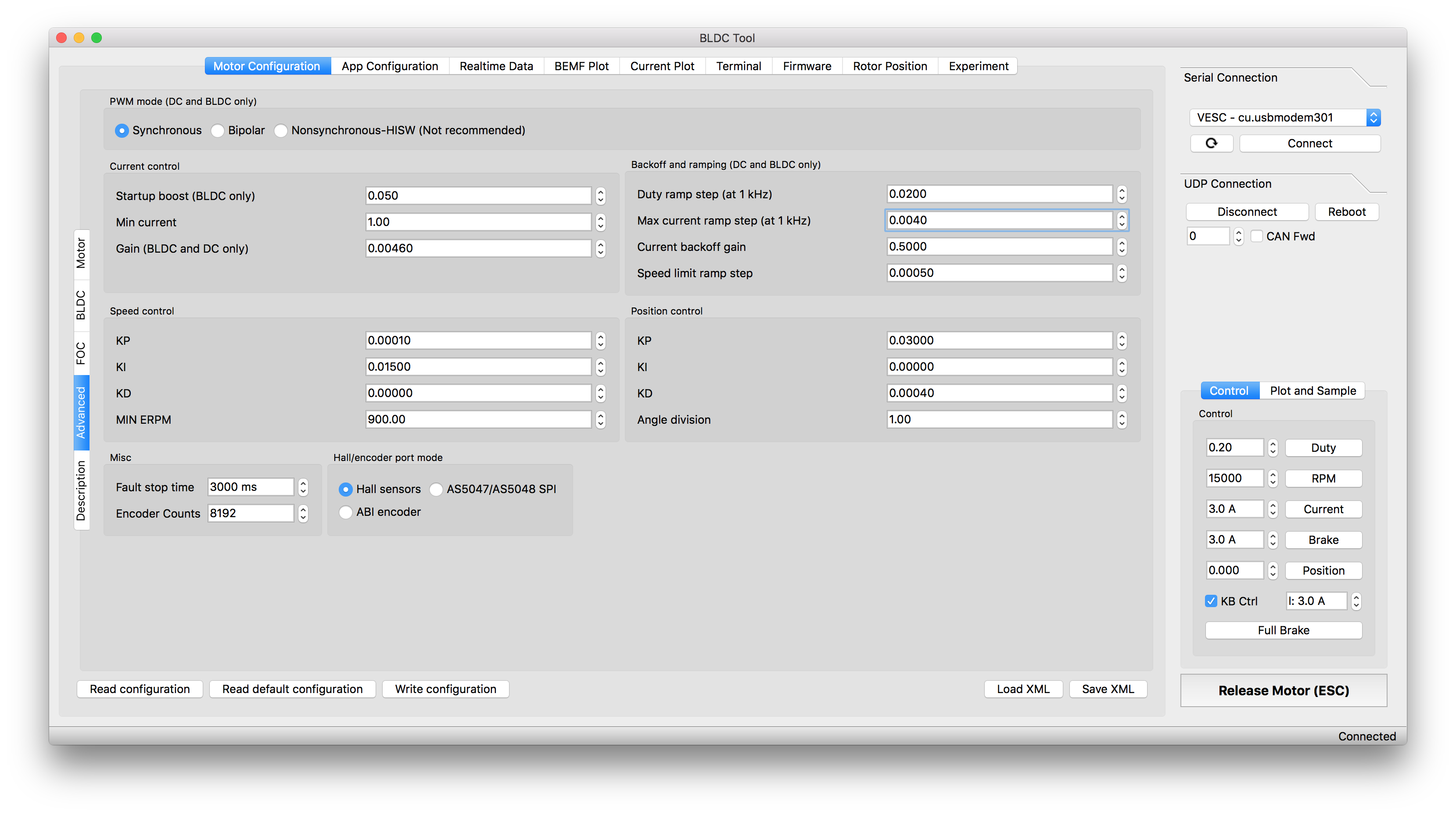
I run calibration with the belt on, just make sure the wheel can spin free. My board with 200kv is set , Integrator Limit 130, BEMF Coupling 860. I usually run motor calibration a number of times and take the average measurement.
Honestly I prefer sensorless operation for simplicity. I still would like to find out what is going on with you settings.
Oh really? I always heard you should run calibration with a free spinning motor. When i did calibration with pulleys, my results were higher i just never set it.
Until you get your settings sorted out I would refrain from applying full throttle from a dead stop. Even after you get it sorted out I would refrain from doing this as it is bad practice on anything with a motor.