24mph in FOC would be perfect me. Good to know that. I’ll try FOC settings this week . I’ll let you know how it goes.
New video!

Ride log:
On this one I blew the fuse, duh, I had set 30A as my max input current per vesc because my battery can stand it but it was too much for my fuse (rated 40A) so I had to finish the ride/video there - I set 25A per vesc now and put a 50A fuse now 
edit: the reported current in the log overlays is for 1 vesc only
2 Likes
I see that you are not afraid of losing balance and send your longboard to the water channel.
2 Likes
I dreamt about it once though lol, also that I let a guy try my board and he ran away with it / on it ^^ hope they’re not premonitions
edit: also I did that part of the commute for 3-4 months last year because I was working near whitechapel
new weekend, new video:

log:
1 Like
He tried to steal your board??!
it was just a dream ^^, but yes I’m a bit afraid of letting people I don’t know try my board in general because if they know how to ride a longboard and they run away, for sure I will not be able catch them probably a feature to implement on the vesc firmware or on a bluetooth connected app would be a timed or remote kill/switch that makes the board slow down and stop after a cerain time after activating such a mode or if you press a button on your phone… maybe it’s just me being too paranoid lol
2 Likes
@makevoid @naf just letting you guys know, I run a single 2.5 on 12s2p on foc, and I usually hit 32-34 mph, max I hit was 38 (slight downhill). I have yet to change observer gain, does, what exactly does it change?
I’m not totally sure but it should help with the startup. After changing it from ~13 to 100 I noticed a smoother start and I could start on flat without pushing.
1 Like
There is a time in the bottom-right corner of the video, is it added by camera, overlay or Premiere? I noticed that it is one hour earlier than JSON time  and I wonder why?
and I wonder why?
camera way easier to sync the video with the timestamp on both 
edit: I’ve seen your released a fix on the new version, I’ll try it next weekend probably, many thanks!
Edit2: today’s ride (a bit rainy so no video)
Also another update: the nano x conflicts with speed cameras frequencies here in London, Uk (losing signal a little bit when you are nearby them) a bit like the other remotes, when the nanox x battery is not fully charged, I noticed no signal loss at all when charged
edit2: also the nano x has a problem I haven’t noticed, it breaks very hard unless you press back and forth on the throttle of the remote before powering the board - more infos here: https://www.electric-skateboard.builders/t/abrupt-brakes-new-vesc-x-enertion-solved/23896/ (btw thanks to the guys for finding the solution! much better now)
Hey man, great videos!
I love the stabilizationm, what stabilizer do you use?
The last video is far better than the previous ones, since you can see more forward
Your front foot makes me feel uneasy, as it’s placed vertically instead of horizontaly, you are steering the board with the back foot and there is not much control on emergency situations, aren’t you getting too much strain on the back calf after a short run?
Zhiyun-1 Pround, yes I got an extension stick which is not perfect but it works, videos are better with it. About the feet well, I am no experienced skater/lb but I did snowboard for quite some time. I started by placing feet almost parallel (snowboard-like position), while that is great for carving at higher speed I found more comfortable to have my front foot (in the w-concave pocket) and more angled towards the direction of travel. This gives me the possibility of putting most of my weight forward on the front foot and actually is putting the weight forward-left or forward-right and crouching a bit that lets me steer, the back foot does almost nothing other than pushing me a bit forward maintaining contact with the deck (useful for sudden braking, accelerating while turning etc). It’s not a tuck position but I think the concept is similar, I agree that being with my weight all in front is straining if the road is rough (btw 97mm wheels help), I try to use a different stance for bumpy roads with my feet almost parallel and away from the trucks so that the deck absorbs some vibrations. What’s your riding style?
At my firsts e-board ridings I used to place the front foot like you, but after more riding I started to realize this foot placement is way better for control, easier on both calfs and you feel safer on tight turns, however you need to get used to it, just give it sometime and soon you should realize what I’m talking about

BTW here is a video of me riding in Lima, I would like to make a stabilized video from the perspective of yours with the extension stick.
I just mounted the GoPro on my belt:

2 Likes
Very nice ride, I’m more conservative as rider than you, especially when filming. Also your board seems to have a very powerful acceleration, dual belt drive right? Cool.
1 Like
Differences at road manners are huge. There’s no way i could ride like that in traffic where i live. Everyone just panic when they see me because they don’t know what to do and skaters are here well known as hooligans
Yes. It’s dual belt drive with 6355 190kv motors.
The acceleration is amazing, however I want more, so I’m building a Trampa with dual 6374 190kv for 40% more power and I’ll upgrade to 12S
@makevoid What MOTOR MAX value do you think would be optimal for Carvon Single v2.5 85kv ?? Do you think I could go with 80a ??? My battery max is 60a as the BMS is 60a.
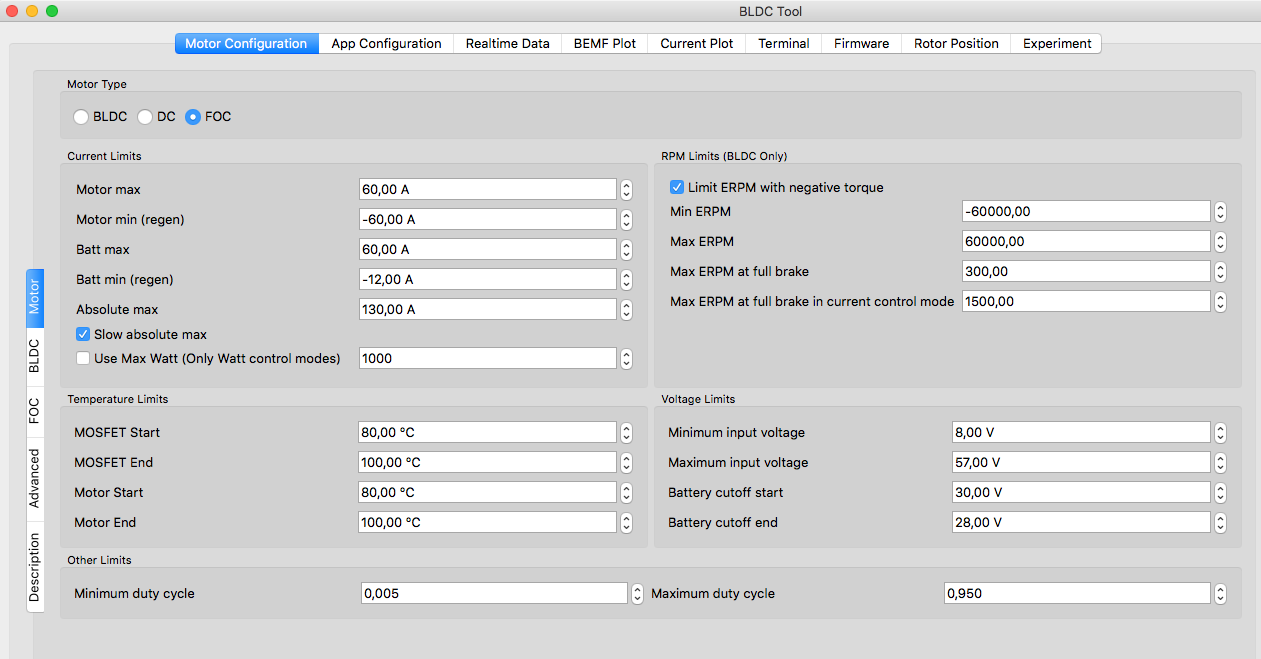
Is your battery 10S too? Try with 50 or 60A first and then add another 10A, do a test ride and see if you need to add more, repeat. I won’t go over 80A w carvons 2.5 probably. With the new vesc tool you can set the throttle curve and I think BV suggests to have the same value of input current, motor max and min and adjust the acceleration via the throttle curve if you want to increase it (new vesc tool or ackmaniac s firmware w/ watt control mode). So 60A / -60A motor max/min, 60A input current in theory. Anyway I never tried more than 50A input current at 10S so maybe start with 50A