Probably the most informative and interesting thread on the interwebs about the Leiftech and it’s true performance and issues. Makes me want to find a cheap, broken one, just to upgrade it the way @nowind did.
3 Likes
Hello friends!
My deepest apologies for the delayed update. New semester started and i didn’t have much time to work on the board.
Anyway, let’s get down to brass tacks. As it stands, the board is about 90% complete.




Currently, both VESCs are powered and drive, but i’m having trouble getting them to run at the same time. I haven’t had the chance to get an oscilliscope on the CAN signal to determine the cause of the problem. However, the pods can be driven, and rotate as they were designed to! This bodes well for the end product.
On to the build updates.
I ran into several problems during fabrication. The first being with the batteries. I ended up building a VTC5a 6s5p pack capable of pushing 100 amps continuously. In order to carry this current, i custom cut bus bars out of 1/8th copper. However, due to the thickness of the copper, we were unable to spot weld effectively. So, we found an alternative: silver filled epoxy.

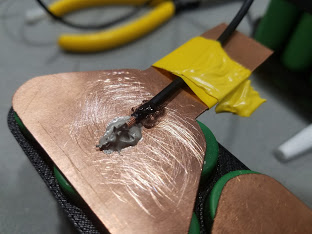
This same epoxy was used to mount the balance wires (seen above). After 10 discharge cycles, no issues have been seen thus far.
I also plasma cut the remainder of the pieces, drilled, tapped, and added other features. Furthermore, every piece was powedercoated, to provide electrical insulation, and for aesthetic appeal.






Wheels were mounted to hex collars using a lathe, and then placed on hex shafts along with corresponding sprockets.
Really the only thing that remains to be done is to cut the top cover of the deck, mount the foot holds, wire the hall effect sensors to the slip ring from above and below, and cut and mount the chain.
I hope to keep you updated, but likely won’t have time to work on it until Christmas break!
Best,
VillainousJ
7 Likes
Make sure you have the master vesc with “multiple esc over can” checked on the ppm page, and the slave needs “send status over can” checked on the app page
Master should have an ID of 0, slave an ID of 1 set on the app page next to the “send status over can” checkbox
Build looks amazing.
1 Like
WOW now that we know silver epoxy sticks well beginners that don’t have a spot welder could use that to make there 18650 packs
I’m a bit sceptic if it will stand rough vibrations or even Jumps with the Board ?
It looks amazing !!
If you have Time, id have a few Questions.
-
Do you plan to “opensource” it or produce it ?
-
what Motordiameter are you using 50 or 63mm ?
-
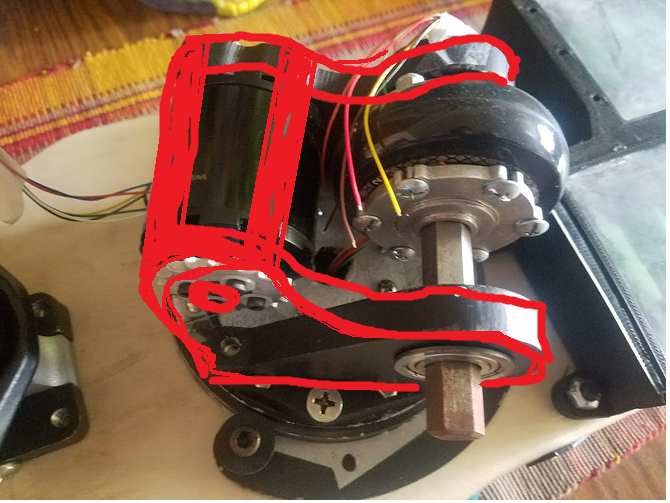
It looks like there could be alot of Torque on the Motor-axle having the Sprocket on the unsupported end. I think it would be good to support the Motor Axle on both Ends, this might also be a good way to protect the Motor from possible Rock and cobblestone impacts. Possibly evene with some “fenders”
I have seen really bashed-up Leif-Board Motors, so that would be an amazing “tough-up-date”
Greets
Notger
2 Likes
Hello!
I have no plans to do any sort of production, as all the components cost me upward of $800, and the machining was on the order of 30-40 hours. The price point would be too expensive for people to buy, I think. I can take a crack at updating my CADs and posting them over the next couple months. They won’t reflect a bunch of little, on the fly changes i made however, so they won’t be anywhere close to “plug and play”.
As to your comment about the integrity of the motor mount, I ran the stress equations on the motor shaft and casing, it doesn’t look like there will be any problems. If anything, the teeth on the sprocket will shear.
The motors are 50mm 150kv 2200 watt motors from that one alien website (the actual name is escaping me at the moment). I agree! Fenders would be cool in later iterations. For now, I’m just trying to get the board moving.
I’ll keep you updated!
-VillainousJ
1 Like
Yeah I’ve tried that.
For whatever reasons, the VESCs won’t hold the flash once I load them. So I can’t tell if the settings “stick”.
The alternative is just to build a Y cable from the receiver and just deal with any sync issues from there.
Thanks for your input!
-VillainousJ
2 Likes
I’m definitely interested in the CAD files, and i know what you mean, i made the same experiences (not beeing plug and play) with my CAD Projects.
Iwould be interested to see some photos of the Motor-Phase-Copper-tracks, → how did you design the contactor and the Tracks
greets
Notger
1 Like
Notes on Silver Epoxy:
The spec sheet seems to indicate that it has very similar strength characteristics as normal epoxy. So, it should be able to hold up relatively well with a large enough contact patch. Considering it’s only holding thin copper bus bars, and the contact patch is the entirety of the 18650 ends, I don’t see any issues.
1 Like
What about the specs on current flow? I meant like how much current can it safely carry before getting to hot and possibly melting
I haven’t been able to run the motors under load yet. However, having reviewed the spec sheet, it seems like it has a relatively low impedance. So it should run fairly cool. I think the trick is to have a thin layer over a large contact patch, to minimize resistance. I achieved this by laying down a bead and pressing the cells on one at a time. I’ll absolutely keep you posted!
I’ll do my best to get the cad files up sometime soon. As per your track question, I actually didn’t use brush style slip rings. Instead i cut tracks in 3 phases of aluminum and am running the current through aluminum ball bearings. Pics seen below. The real trick is to keep all three rings in contact at all times. To accomplish this, i used a compressible medium and a diaphragm, allowing the inner rings to “float” and maintain constant contact.


The inner slipring is simply to pass the Hall Effect sensor signals to the VESC. Most of the current passes through the lazy susan itself.
10 Likes
man, thats genious !!!
3 Likes
This is epic on lots of fronts, the simplest point being the silver expoxy part, if it holds and handles the current it has legs
Care to share the brand and what tests for vibration/ current?
1 Like
I noticed you have some questions about the silver epoxy!
The product is MG Chemical 8331 Silver Filled Epoxy. I haven’t had the opportunity to run any physical tests yet, but the math indicates that i will have no problems with vibration or shock!
The full data sheet is available here: https://www.mgchemicals.com/downloads/tds/tds-8331-2parts.pdf
Some highlights: Impedance: 0.0007 Ohm/Cm Tensile Strength: 15 N/mm^2 Shear Strength: 1.8 N/mm^2. Working Temperature, -67 to 306 F
Considering the large surface patch on the batteries and the small mass of the bus-bars, I am not worried about losing contact.
Best,
Villainous J
2 Likes
Wow pricey tube of expoxy! May give it a whirl in the future sometimes thanks for sharing
1 Like
Any Progress ? would love to see some Photos.
1 Like