Trust me today I can’t even walk my legs hurt… That torque is sick like all the time it tries to take off 
2 Likes
That’s what she said 
2 Likes
It’s almost here 
4 Likes
So with these controllers, one could build a 4wd, with +80mm motors, absurd gearing like 15:30, on 110 wheels and still have loads of torque?
1 Like
80mm wheels on 110 wheels will not have much clearance or etc 
Don’t know if @mmaner or @longhairedboy have yet tested them but I have run into some configuration issues Hardware wise it is really solid and nice looking product Have to get some extra JWPF connectors so I could get this into sensored mode
@jayx is building a test rig for them now with some old li-ion 26650s of unknown chemistry, probably ICR, maybe INR, who knows. It’s gonna be a real rat rod scrappy scrapper.
Follow his build on https://www.instagram.com/theonlykindajake/
Based on what i’ve seen, it’s nothing like vesc tool and its kind of weird. The entire package is nothing we’re used to. Also, no 13S. 12S MAX.
The plan is to drag race them if they work out because they’re allegedly so awesome and can take so much powah. We’ll see about that shit, son.
Then i’ll take it to Colorado and get @Lunasi and @MoeStooge to race on it because i want to see that.
11 Likes
Colorado needs a Pikes peak Race…
3 Likes
Only fair to state you were using outdated firmware.
Well if it was major or at least minor version release yeah I could say its firmware issue
But I will try this weekend again Biggest concern are motor out of sync as they spin at different speeds and braking issues.
1 Like
So far we’ve just been putting every release out as a new patch release number. Don’t take this to mean the changes are trivial. I’m not sure it’s going to fix all your problems, but it’s a good place to start at least.
If the different speed you’re talking about is what’s in that video in your other post where the motors aren’t always in speed-sync, don’t worry about that unless you actually feel it when riding. Since the Arc drive is a true torque-mode controller as you have it configured, it takes almost no current to spin up the motor with no mechanical load on the wheel. This means tiny little tolerance offsets in the current sensors, throttle PWM/analog sensors, etc. add up to tiny differences in current commands. With such little mechanical load, you see this when there’s no load on the motor. For example if one ESC is seeing a 1A command, it might spin up while if the other ESC has a 0.5% tolerance difference on command, out of 200A full range it might be reading 0A command at the same time. The 1A motor will spool up while the 0A motor is still sitting still. Once you ride it, you no longer notice this because current commands are much higher.
The braking issues are my biggest concern that we need to get fixed as the top priority, then see where you’re at on ride quality.
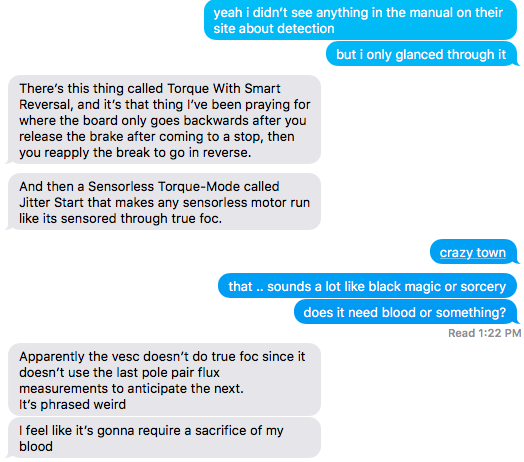
was just texting jake about the ARC units we have… he sent me this. I thought it was interesting. I’m the blue bubbles.
8 Likes
What about the CAN? I have made a cable but I couldn’t find anything related that apart input type. It was shown in video of setup but I can’t find it.
1 Like
@christensent Normally I don’t run FOC, if I do its only hybrid mode. I don’t mind the sound and with the VESC I don’t see any benefit to FOC at higher RPM’s and there is a significant hardware stress issue.
I’m just waiting on an enclosure to get mine up and running. My tentative setup is sensorless. Should I order a 2nd fly lead for sensored operation and can cable or is this good enough?
we couldn’t find the CAN bus either. Also, motor detectionis somethign called “autotune” which of course only makes me think of hit singles by Cher.
4 Likes
You will see CAN options when you install the latest firmware. I just confirmed it is in v1.1.5.
@mmaner Arc is always FOC in all operating modes and states, so there’s no need to select or worry about what mode it’s in.
In our internal testing, most people have been quite happy with sensorless performance. It’s not perfect and if you want full starting torque from a stop up a steep hill, you’re going to need sensors. If you get the board up to even a crawl speed it will pick up sensorless no problem, and on flat ground jitter-start will usually start a vehicle from a stop (when optimized for your vehicle… it takes some trial and error to get the right jitter settings, with the default jitter start settings it often won’t really start a vehicle sensorless without giving it a kick to start moving).
4 Likes
That sounds doable, I kick off anyways, feels weird not too . I should have something up and running by this weekend.
1 Like
I would definitely try sensorless first, I am totally happy with it (but I am also lazy and don’t want to hook up sensors!)
1 Like
what does the wiring for that look like? These floppy dongles with weird connectors are killing me.