I mean the slightest delay so it’s not instant power. I don’t have sensors so it stutters when trying to change direction at times also. Motor values are 80a -45a dual
Without sensors it is of course a pain in the A…
If I’m stopped it starts going forward well most of the time. But when I’m reversing and press brake which then turns into forward I’m still going in reverse slightly which causes stutters.
I think most people are using unsensored motors.
Predictable would need that it is the same no matter the direction. Making a difference in behavior for forward and reverse seems highly unpredictable to me. I was surprised when testing the function and the motor suddenly spinning even though I had it enabled and it was supposed to just stop. The natural assumption is that it should work the same both ways. How it is now is unpredictable.
Why is not the number of poles or pole pairs of the motor a parameter??
Can this firmware run a four pole motor?
@Ackmaniac, can you tell whats the default settings of the Raptor 2, what are the limits for Amps and Watts and total Watts, Reverse, TractionControl etc.?
I decided to give a try with Watt control but for some reason, my remotes don’t work in this mode. I tried repairing multiple times and nothing.
I reverted the firmware and used the old BLDC tool and they started working again.
The new bldc-tool was working fine and with the new firmware. I could test the motor and even control with the keyboard. Everything looked fine except the remotes
I must be doing something wrong, but I don’t know why. Any have an idea what it could be?
I have a nano remote and a gt2e remote my vesc is from Diyelectric skateboards and on their site the description for firmware and hardware are:
VESC Hardware v4.12 VESC Firmware v2.18
Well, i did a test at home with watt mode to check the reverse function. It worked but too much throttle 

7 Likes
Can you be more specific on “don’t work work in this mode”? Screenshots of your app configuration tab in BLDC tool would be helpful
You can limit reverse speed with the min erpm I think I have it at about -10k. Also unchecked limit erpm with brake. Still not ideal but works okay
My description was confusing… I accelerated forwards a little bit, then full brake (small room) and then i put unintended full throttle in reverse ( in my head it was still the brake). As a reaction of this happening i gave full throttle forwards. This is the forward burnout on the picture. DON’T TRY THIS AT HOME. I am scared for now but i’ll try to tweak the reverse speed as you mentioned when i go watt mode again. Thanks!
Oh okay that makes more sense. Make sure you check box that says enable maximum erpm for direction switch. Idk why it’s not checked as default but I think that may have contributed to the confusion
1 Like
I redid everything and started taking print screens of all the windows
found the problem here
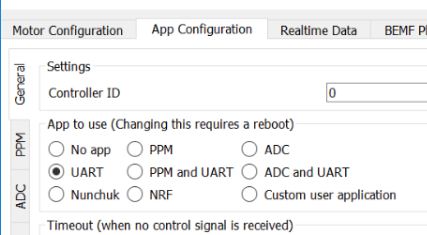
I changed from UART to PPM and now it recognizes the controller input
1 Like
Would it be possible to program a button on a controller turn on and off 5V output pin on vesc?
Also is the Android app open source? If not are there plans to add Android Wear support?
Are there any vesc apps with Android Wear support?
I don’t see why you couldn’t add an output like that. You’d have to get into the code though ![]()
But it really just depends on what you’re using it for. The 5v line on the VESC is limited to 1 amp max (and i’d keep it under that). So if you’re just driving a switch or communicating with another board, you’re probably fine. If you’re looking to run an LED or something, you may blow something
I haven’t seen the source, so I don’t know if it’s quite open source
I’m not aware of any apps that have android wear support that I can recommend. I heard of one app that may support it, but due to some poor behavior by the developer here, I don’t recommend using the app so I won’t link to it. Feel free to search around for it though ![]()
Hi there. Noticing you did some great improvements here! As I’m waiting for my FOCBOX to arrive I was wondering if the following would be possible to do or implement.
Both Nano v2 and Nano-X have the “feature” where you need to go full throttle and full brake before you can use full range of the stick. Otherwise, a small stick movement results in a massive PPM movement which could mean a harsh brake or very fast acceleration, both not very good for rider 
Coming from the quad world, there is this “arming” procedure where the motors will not start until a arm switch is turned on or there is certain stick movement triggered. I don’t know about the Nano-X but Nano v2 had a 2nd channel that could perhaps act as a arming switch?
Or better yet, set up arming trigger where throttle switch has to go full up and full down at least once (twice preferred) before motors would “arm”.
I hope you can understand what I’m trying to say here, I suck at explaining my thoughts to others (“I swear, it was so clear in my head” haha) xD
1 Like
When i brake in watt mode it drives backwards after full stop without releasing the throttle! I have steez remote…
… meanwhile i clicked “enable maximum ERPM for direction switch” it works now as described.

how? 
1 Like