At the master you need your normal control mode like current control and at the slave you need to select the control mode with cruise. So the opposite of yours.
1 Like
sorry Ack I changed the photos in order to enhance the quality while you were helping me. Maybe I inverted some photos. But now they are in order. Can you check again? Because I was sure I had already followed your indications: I set
Master = 0 = “Current no reverse with brakes” Slave = 1 = “cruise control via slave”
I re-set these value once more to be sure after your comment and I got a weird behaviour: just touching the throttle caused the motors to spin at max speed. Couldn’t brake. I’m clueless
You need to connect Channel 1 to the slave vesc and not channel 3. Just a tip, set a high deadband like 50% for the slave so that cruise really only activates when the wheel is turned a lot.
By the way, to all Vesc 6 owners. Don’t use the ppm cruise function because it can brake your ppm pins. Focbox and other which are based on Vesc 4 hardware seems to be fine.
2 Likes
Thank you Ackmaniac. It works!!!
Sorry if thas was covered already, but on this tool how do I set a Soft RPM Limit to limit my maximum speed ?
Thank you
1 Like
Sorry if this was already asked. But I couldn’t find it.
I finally got to the point of this build to program the FocBoxes. Everything went well until I realized the motors were going on the wrong direction. I went to swap the phase wires and the motor just seem to cog. I guess it’s becuase of the hall sensors?
I know there’s a reverse motor direction function but can find it!
I’m running FOC if that makes a difference.
1 Like
Do the motor detection again after you swap the wires
1 Like
Thanks. I’ll try that later. Has it always been like that? I remember just flipping two phase wire did the trick
I think if you are not using sensors it might not matter. If you are using sensors you’ll need to recalibrate everything
2 Likes
@b264 is right. If you are running for it hybrid you need to redo the detection without wheels mounted for it to be ultra accurate. With bldc it doesn’t matter if you switch phase wires assuming there’s no obstructions in the can.
2 Likes
Wait, what? I thought there had to be no pullies or anything mounted. Really, is removing the wheels enough?
1 Like
Thanks guys. That was the issue. Didn’t use sensors before. Not having wheels on it… lesson learned
2 Likes
No, your right. I’m tired  . Nothing should be attached to the motor.
. Nothing should be attached to the motor.
1 Like
Need some help with braking in FOC.
I flashed my 4.12 Vesc´s with the latest 3.100 firmware and did setup FOC sensorless for both Vesc´s and motors. I am using the Nano remote and the Vesc´s are connected via Canbus, both motors are spinning after a slight push and acceleration is just fine and smooth. In PPM i have set current with no reverse and braking. And my remotes signal is centered. But when braking, i just get strong braking for a split second and after that the board coast´s and brakes in a rhythmical pattern but with no braking force at all, i don´t know how to describe it, it´s like a kind of cogging. I played with battery min. regen. and lowered it down to -7 to no avail. Sometimes when i accelerate just for a short time the braking works as expected, but if the speed drops beyond a certain amount the board start´s coasting again. When I accelerate to a higher speed the brakes will disengage immediately. This kind of cogging, or whatever i should call it, happens through all the throw of my remote, so the Vesc seems to recieve the signal properly. Running the same setup in BLDC works just fine. I hope someone can enlighten me, i really want that silent FOC to be running. Here in Japan people are jelling and swearing at me because of the noise running BLDC.
I never run BLDC but I have similar problems with FOC when going downhill and the regen current of -10 is not enough to stop my (m)ass. Are you trying to brake on flat spot when this happens? What’s your weight?
Yeah flat ground. And the speed at that is happening is random. I just plugged both VESC’s in to the Esc tool and saw that both show the f*cking DRV error. Anyway motor detection still works in both modes and in BLDC everything is working as it should.
NEW ACKMANIAC_TOOL 3.101
Just released the new Version 3.101 of the Ackmaniac-Tool which includes the latest changes of Benjamin Vedders original firmware and fixes 2 important issues.
-
By another thread i realized that one of the motors stopped braking when the maximum speed is exceeded like one user reported. This also caused the problem that dual motors did brake uneven when connected by CAN and motor min and motor max had different values. With the new firmware you will realize that the brakes feel less strong but you can simply adjust that by increasing the motor min value. Because now they brake with the same power.
-
And the other problem was that the brakes disabled themself when the start of the mosfet or motor temperature was reached.
Both issues came from the original firmware and i addressed the second problem already in the official VESC forum. The first problem came also from the original firmware but Benjamin never used the function that caused the issues.
Another minor issue is also fixed which let the slave motor brake when you try to enable cruise control while driving backwards (guess nobody noticed that).
I recommend to update the firmware even if it takes some time to setup everything again. Maybe you should first save the settings with the old Ackmaniac-Tool and then load these settings in the new one. But still double check everything. And test the board properly if everything behaves normal after the update.
PS: I realized that when the master and the slave have both “Send status via CAN” activated and the same “Controller Id” then the slave motor can cut out. So please be careful that the master doesn’t have this parameter enabled and to be safe give them a different “Controller Id”.
11 Likes
Sorry for deleting posts but i think the update info is important. BTW i updated the GIT repository. And Mac version is hopefully coming soon.
4 Likes
Anything change with canbus? Can’t seem to get both motors spinning now with the newest firmware.
1 Like
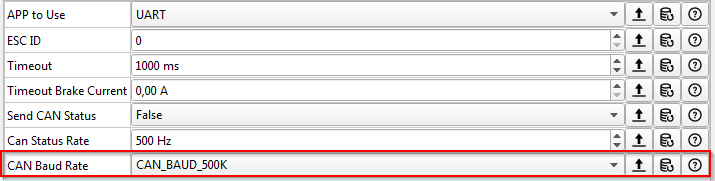
Yes the CAN Baudrate needs to be setup now and should be the same on all ESC. I recommend 500K. And take care that “Send CAN status” is only activated at the Slave and disabled at the master. And as there are new messages for the CAN Bus all VESC should have the same firmware. So don’t try it with only one updated. just flash both and then do the setup.
3 Likes