I could solder one and if that works will I would be willing to solder a bunch… Of course with @shaman 's permission… 
2 Likes
Someone has already offered to assemble 15 controllers for me. Him and I have been discussing details. However, I won’t stop you if you want to do more on your own.
1 Like
Ha! I’ll let you know
1 Like
Due to the amount of likes I got for the Cheap FOCer name, I’m gunna roll with that for my ESC. Keeps the VESC name owners happy. Keeps me happy with an original name. Keeps you guys happy with a name you liked.
16 Likes
Hehehehe super cool. I would like to get one just for the name 
6 Likes
Great name! “He’s a Cheap FOCer”
Can anyone find a cheaper version of these waterproof aluminum boxes? I found this one for about $20 delivered on aliexpress.

3 Likes
 https://www.digikey.com/product-detail/en/hammond-manufacturing/1590WB/HM586-ND/284783
https://www.digikey.com/product-detail/en/hammond-manufacturing/1590WB/HM586-ND/284783
These are the Hammond 1590WB. The “W” marks the IP65 waterproof version. The difference is that it has the gasket and o-rings. You can also just buy the regular 1590B and the gasket/o-rings separate.
4 Likes
Sorry I haven’t posted in a while. I’m actively working on setting up the loaded testing with the dyno and such. This test will be conducted in a lab environment and I’m working with the lab manager on details. Testing is tentatively scheduled for Friday afternoon central time. I’ll keep you guys on the thread in the loop as best as I can.
10 Likes
Unfortunately no testing today but I got the majority of the setup done. See the link below to my most recent post in the Endless Sphere. Couldn’t post the content here due to a forum memory shortage. Going to try again Monday.
https://endless-sphere.com/forums/viewtopic.php?f=7&t=97699&p=1449031#p1449031
4 Likes
@shaman sorry if the question was asked before, but I don’t remember that it was,so… What do you think is the max ERPM limit with the drv you use? The old basic v4.12 hw was limited to 60000. Which was already critical on 12s and motors with 200+kV.
1 Like
It will be the same for this one and most likely anything that uses the STM32F405RGT6 along with the VESC firmware. The limit isn’t due to the DRV, it’s due to the processing speed of the microcontroller.
1 Like
Thats for 4.12 hardware. The VESC 6 stuff is higher I think. My next gen controller may be able to go higher as well. We’ll see.
1 Like
I don’t know what is used in the focbox, but they tested till 100000 which is already better.
Also the vesc 6 design has a limit above that (140000 if I remember right  )
)
There is no easy way to extend the erpm limit? I personally don’t see an issue as I use 190kV or lower on 12s, but if your design allows to use up to 20s the kV of the motors would need to go drastically down to not fry the esc.
2 Likes
The 20s capable controller is the next controller I design, not the Cheap FOCer. That high of voltage is more useful in the large hub motors of eBikes anyway. Motors with around 40kV. I will start a new thread for my high voltage controller after the testing phase of the Cheap FOCer.
4 Likes
You can reterminate delta configured motors to a wye configuration. This divides your kV by 1.73. This pretty much forces you to run sensorless though as the hall effect sensors would only be good for the original delta configuration. Most outrunner phases are in delta configuration.
3 Likes
Alright, sounds good 
1 Like
40kv at 20S on an esk8 would have so much torque it’d rip your shoes off. Can’t wait for that.
7 Likes
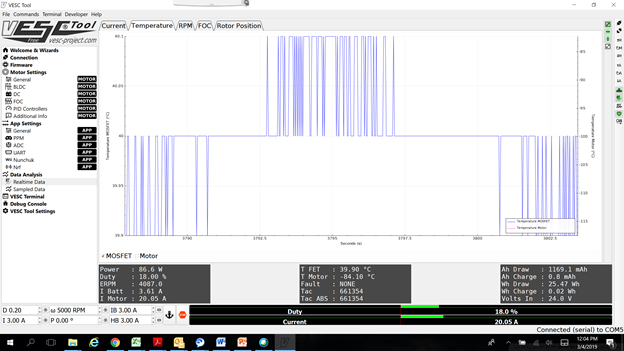
I Motor = 20A

I Motor = 30A

I Motor = 43A
Completed some initial tests at 24V to 27V. The temperature to look at is T FET. The current to look at is I Motor (Phase amps). This is the current that the MOSFETs pass to the motor and therefore cause the heating. The motor was ran at 18% duty cycle in BLDC control mode. Each current limit was tested for at least 3 minutes or until the MOSFET temperature stabilized.The conditions weren’t ideal with the controller sitting in still-air with only a relatively small amount of aluminum for heat sinking. Real life conditions will most likely be much better when the controller is in a full aluminum enclosure with wind rushing past it as you ride down the road/sidewalk. Overall this gives me confidence that this controller can handle 40A to 50A continuous for a decent duration when placed in the mentioned ideal conditions.
Understand that I am testing continuous current limits. This means that you can still deliver higher phase currents to your motor for a short duration such as for accelerating.
I will do loaded tests at higher voltage levels later this week to see if this can handled the coveted 12s battery.
*Test conducted in 23C ambient temperature. Hotter ambient temps will decrease max continuous current handling capability
11 Likes
That’s not always the case when the esc is mounted in the underboard enclosure for example there is only very less air flow around it.
Besides this it non the less looks already pretty good and i‘m sure a proper heat sink will help a lot to get some more amps out of it.
![]()
2 Likes
I would encourage users to mount this controller where it can be exposed to airflow. The hammond enclosures I’ve mentioned should be worthy to mount to the underside of a board. Maybe I’m missing something though.
1 Like