Scr1Shot1 > Voltage Limits
Battery Cutoff Start (according to your bat settings)
Battery Cutoff End (according to your bat settings)
ScrShot2 > Sensorless - Commutation Mode
Minimum ERPM: 50 (Correct)
Minimum ERPM for integrator limit: 600 (Correct)
Integrator Limit: 135 (Check your motor detection param, the value is 134.54)
BEMF Coupling: 850 (Check your motor detection param, the value is 849.56)
ScrShot4 > Current Control
Startup boost (BLDC Only): 0.040 (I use 0.050 but 0.040 is enough)
Please check and apply your motor detection parameter, please read carefully take your time!
Hey Peter here’s my latest settings on the Carvon single hub + Space Cell, everything else I left at default. Also, how much do you weigh? Are you kick pushing on startup or standing still?
Motor Max: 70.00 A
Motor Min: -60.00 A
Bat Max: 30.00 A
Batt Min: -12.00 A
Absolute Max: 130.00 A
Min input voltage: 8.00 V
Max input voltage: 57.00 V
Battery cut off start: 35.20 V
Battery cut off end: 33.20 V
I appreciate you posting your settings, they are a huge help. Are you running BLDC or FOC? Hows the start up torque? I always kick push a few times to get going before rolling the power on. I’m 6’4" 210lbs. I am comparing this all to the 6s lipos I had running on this hub before. On lipos, It felt just like the belt drive I built while waiting for parts for this.
I am running sensorless BLDC mode as my hub doesn’t seems to work with FOC.
I will try sensored BLDC and sensored FOC when I have my JST arrived.
The startup torque for me they are very similar belt and hub with belt slightly on top of hub motor especially starting on hills. On flat ground they are both responsive and agressive. I also do 1 kick push most of the time to get into balance, it’s more natural to do just 1 push.
I am running all of my belt drive and hub drive with 6s lipo 30C 8000mah and 6s lipo 25c 10000mah. Both discharge are quite similar 240A - 250A. Very punchy!
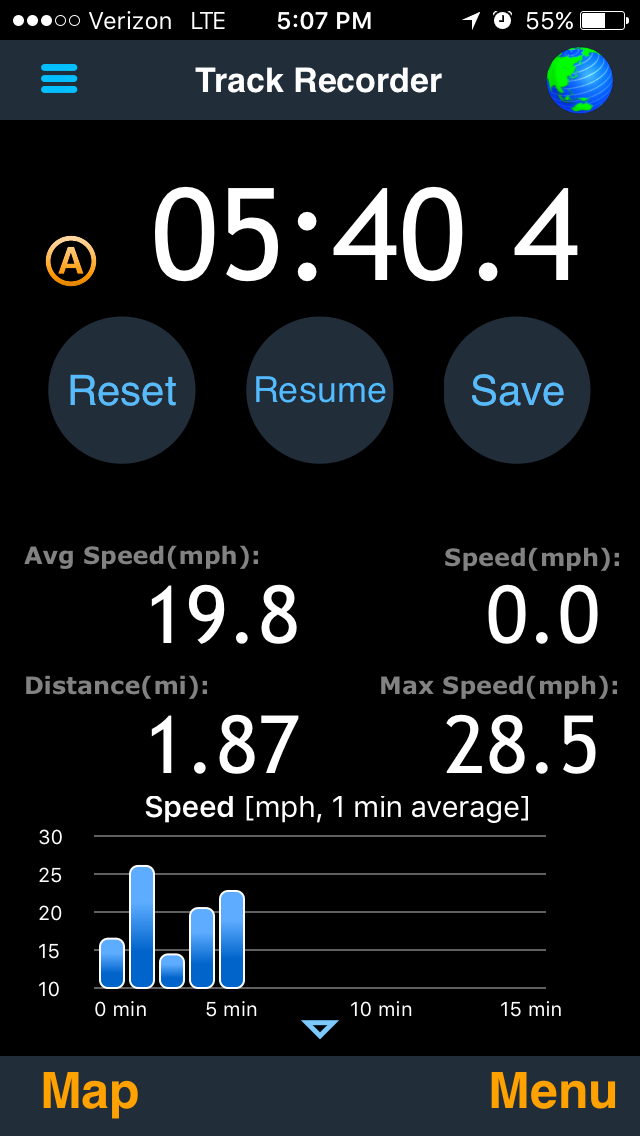
I just got back from a speed run. The results are below. That is still within my comfort zone, but I feel I am maxing out the system due to my size. Also of note, I am seriously worried about the hub motor due to heat. I thought all these components would mitigate the heat. Another point of complaint, the space cell battery isnt lasting as long as I had expected. @onloop advertises 1.5hrs of playtime using a dual motor setup. From a fresh charge, I rode my single carvon for 1x 10min run, and, 1x 5min run. Both runs included plenty of full throttle. It now sits at 57%.
That all being said, I am still trying to figure out what is normal compared to my belt drive, lipo setup. The carvon hub still feels way less torquey than before. although with everyones help on the settings, I have noticed an definite increase in speed. I now want to make sure that they are operating within safe parameters of the hub to keep it from melting itself.
As far as the speed goes, Its not quite at the scary limit for me. I need to know I have that power, even though I cruise at 17-20mph. I like to live a little! I had that with the lipo setup, but I cooked the hub motor using 6s and too much full throttle. Theoretically, since I increased the voltage, shouldn’t my available power increase as well?
@laurnts While changing settings prior to the test run, I noticed that every time I ran motor detection, a different value for Integrator Limit and BEMF Coupling would appear. It varied by about 50pts. I ended up just typing in one of the values and calling it a day. I dont really know what that does, and dont understand why it varies every time if I am to input it into a block?
It’s all about magnets and magnetic fields, so value might varies slightly for every detection (also depends on where does the motor starting position). Thats why Vedder sometimes does multiple detection to find the average value and if the value he have is correct. I also just round it to the nearest value.
I’m running FOC at the moment because of the stealth. I typically don’t have a need to hit top speeds when I’m commuting through downtown. Yes your height and weight are pushing the limits of the single hub which is why it feels less torquey. I have both a single and dual, both using a space cell, and I think if you want that high torque from the hubs, dual is the way to go. For me, I approach my single as a cruiser/coasting board, something that is easily transportable and I can use to get through the city as stealthy as possible - like a hybrid of a natural longboard and an electric. The dual is longer, bigger and heavier, but when I want to power through distances, it’s what I like to use.
I just swapped over to all FOC settings. Just to be sure, I clicked the FOC button on the motor tab, as well as ‘detect settings, apply, and write config.’ on the FOC tab. those were the only settings I changed. I left all the others the same. After a quick test run, I topped out at 27mph even. It sounded ever so slightly more quiet, and just barely noticeably slower on throttling up. which would be evident in the slower top speed.
I can’t help but compare this to the mass amounts of torque I had when running this hub with 6s Lipos and a car esc. It was faster and had waaay more punch. Then again, I burned it out. (Which I cant say enough good things about Carvon’s customer service!!) I am going to assume that the lipo setup was doomed to fail regardless of the results. That this is the way it should feel operating within the hubs safety parameters?
It shouldn’t matter if u use lipo or li-ion and I guess the old esc u used had a higher amp limit than the vesc. Likely has unknown limit. U can still burn the motor out with the vesc if u over cook
I have a 3000w hub motor with a 90kv, using a 6s battery,
when I first hooked it to the vesc, it would not even push the board by itself, I got some help and then it started working a bit better, but I would like some more speed.
I have a 10s coming in this afternoon, and I will see if that helps.
 take your time!
take your time!