I m finishing my e-mtb and i would like to have some advice about the configuration of my FOC BOXs
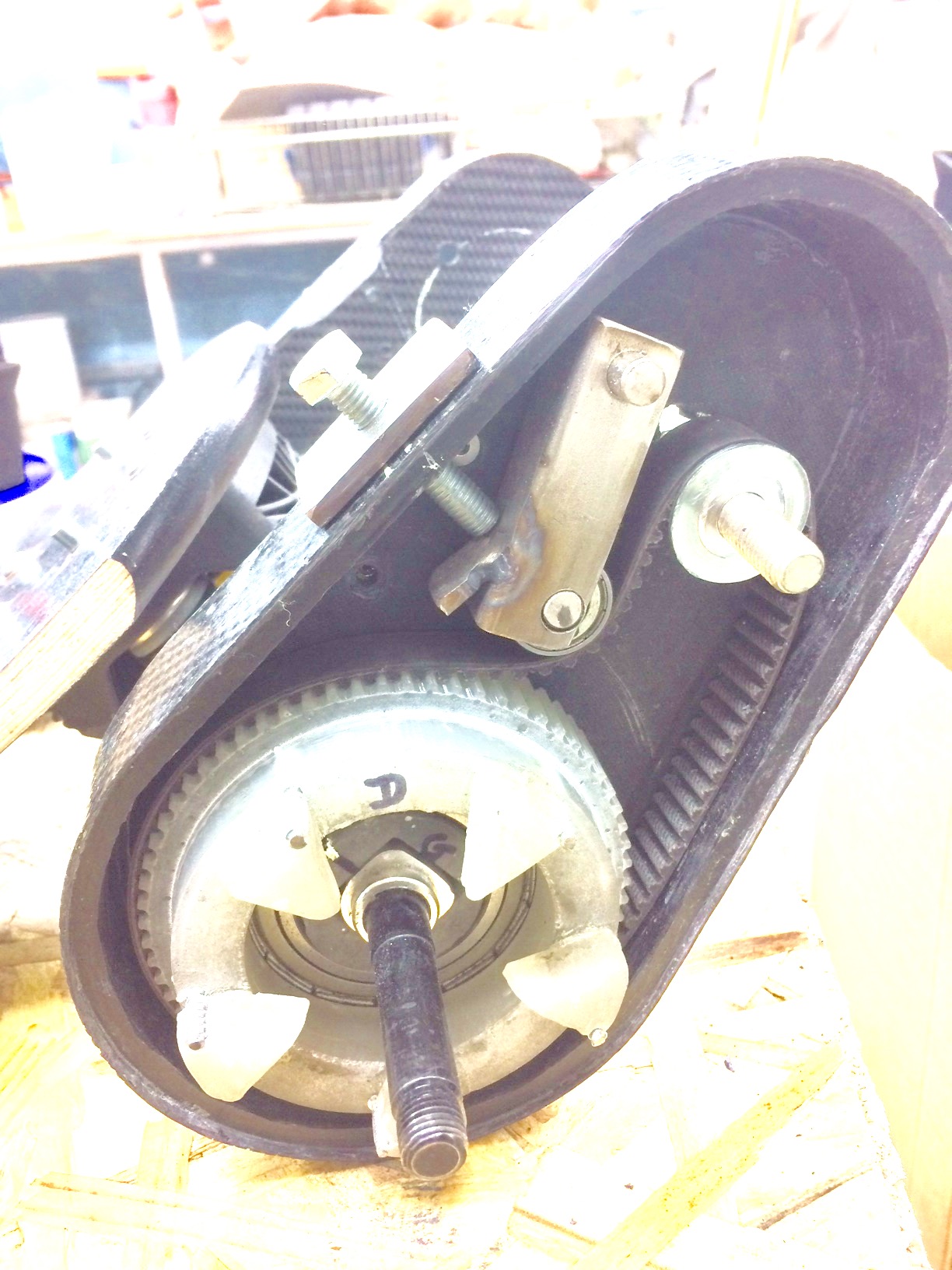
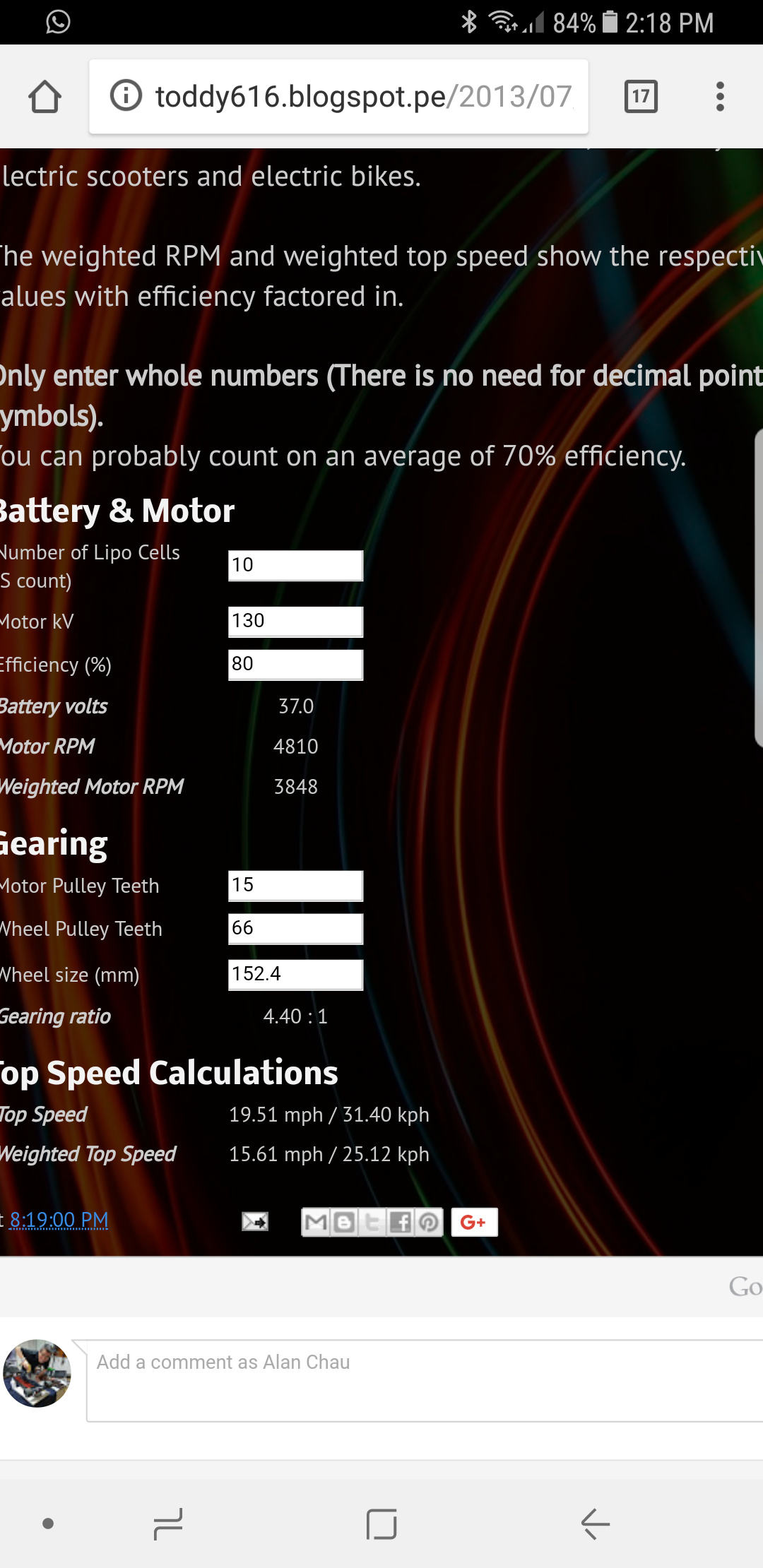
i use 2 130kv sensored motors with 15/66t as transmition
I am good with carbon work and other stuf but I m clearly not in electronics and programming
I have 5x15A of descharge so that make me a 75A ( some say that we can go up to 20A per cell with samusng 30Q > do you have feedback or experience with it?)
Actually I programised my FOC BOX with motor max min 50A -40A and batt max/ min +30 -20A
But when i test it is going so slow and with no power
Beautiful build. I really like the the method you used to route the motor phase wires to the FocBox’s. I run dual FocBox’s on my Evo build, which has 6in wheels. I run Motor Max 80A, Motor Min -80A, Battery Max 30A & Battery Min -20A. Give that a try and see if you have more juice.
*EDIT: I am also running a 10s4p 30Q pack, so 20A per series is fine, the 30Q specs are underrated
Excellent! thanks for your help
I will try that asap. I wonder if it is not the tention device that slow down every thing but I really doubt about it because it use abec7 bearings
How many charges have you done with this configuration? Do you see any loss of range or power during the time?
I will make those changes during the week and will let you know
If you are talking about belt tension, that can definitely slow you down. You want to find the sweet spot between too much (no downward flex in the belt) and too little (belt skips on the teeth. A good starting point it to be able to push the belt down 3/8in without much force. Then adjust the tension UP if you get skips or DOWN if it doesn’t freewheel well.
I’m really guessing on the charges but probably a dozen or so? Maybe?
I normally don’t run a board down past 3.6 but I have on this one a couple of times because its so freekin carvy I just hate to get off of it.
I agree with Mike here, your motor settings are weak. I run +60 and -50 on each of my 6355’s for my 6" wheels. Keep your battery where its at now though, you don’t want to go any higher.
Edit: the belt is too loose.
It’s kind of hard to tell, but It also looks like you may have alignment issues as well.
Either the mount, or the idler is askew, possibly making the belt run off the inside of the wheel pulley and rub on the housing.
The #clearanced part would likely only be rubbing the housing off throttle and when braking.
Change the wheel pulley, use 8" wheels, modify the battery to get a 12s4p array or increase the pulley count on the motor. Those will give you faster speeds and more power band
It’s normal it’s a picture where the motor is not yet installed so there is no tension it is just an iron rod used to simulate the axis of the motor so I couldn’t put any tentions on it
@ eboosted
I use 8" wheel already but clearly de specs used to programise my focbox are much too low
I’m thinking about changing the motor pulley with 18t instead of 15
But here the problem comes from the figures used for the vesc because I’m supposed to have a lot of torke witch I don’t have now
If after all of this it doesn’t improve I will go for a new battery pack but it will be my last choice
Changing up to 18t will decrease your torque, and you say you have little already. Is it acceleration or is it top speed that is bothering you?
Im on 200mm pneumatic too. I use 15/80, 2x192kv sk3, 2x 4.10, 12s 2 x 6s 5000mah lipo in series 30c. One recommendation is to you sensor your motors it made a big difference for me under 5mph. I can go at walking speeds up hills now.
For reference. My battery max is 80a i peak at about 60a and average 8a.
You might want to watch you voltage drop to see if it is indeed your battery that is the weak point. Set up some telemetry.
Really nice one man! Nice to see eMTB build using other mounts than ones from Nowind or Idea I particularly like Your passive focbox cooling, nice and neat!
Have one advice for You, SEAL those slots in your battery tray, shit tons of debris is going to get in there
thx
Yes I already put an adhesive foam between the two 3D printed extremities but I think it will not be enough. The thing is that even with ms polymers or other glue I think it will not work properly because the junction have tendencies to move a little bit when the deck is bending.
For the all length I use a Rubber scheet that allows the box to bend while keeping the inside protected from dust and water ( I will take more pics to show you )
I hope it is clear enough what I say because I m French speaking
right now I have a power switch with a 40A fuse but it’s clearly not enough. it is a car blade fuse
I have in stock a 50A fuse from boat battery system that support a 50A continuous current and can resist till 120 if it is momentary do you think it’s enough? do you think that It will work if I unsold the fuse holder with the 40A fuse from the power switch and I sold a bigger fuse such as a 80A or a 100A
What do you have on your build?
any advice to not burn my board at the first acceleration is welcome
hi everybody i come back from a test cession and it’s really disapointing no any power even if i pull up my specs
i don’t understand were the prob comes from
the motors are slighly coghing while i accelerate
I took a video to show you what happen with a full acceleration!
Like @Pedrodemio said, make sure you do the motor detection. Also make sure your remote is setup correctly in the PPM tab. Are you running FOC? I would make sure you can run well in BLDC and then move up from there. Is there any chance your wiring is not a large enough gauge? Post some pics of the inside so we can proof your electronics.
somone from esk8.fr have the same broblem and it seem to be the motor that is changed by OVERION and due to this there is a problem with the erpm detection



 I particularly like Your passive focbox cooling, nice and neat!
Have one advice for You, SEAL those slots in your battery tray, shit tons of debris is going to get in there
I particularly like Your passive focbox cooling, nice and neat!
Have one advice for You, SEAL those slots in your battery tray, shit tons of debris is going to get in there 
 thx
Yes I already put an adhesive foam between the two 3D printed extremities but I think it will not be enough. The thing is that even with ms polymers or other glue I think it will not work properly because the junction have tendencies to move a little bit when the deck is bending.
For the all length I use a Rubber scheet that allows the box to bend while keeping the inside protected from dust and water ( I will take more pics to show you
thx
Yes I already put an adhesive foam between the two 3D printed extremities but I think it will not be enough. The thing is that even with ms polymers or other glue I think it will not work properly because the junction have tendencies to move a little bit when the deck is bending.
For the all length I use a Rubber scheet that allows the box to bend while keeping the inside protected from dust and water ( I will take more pics to show you 


 no any power even if i pull up my specs
i don’t understand were the prob comes from
the motors are slighly coghing while i accelerate
I took a video to show you what happen with a full acceleration!
no any power even if i pull up my specs
i don’t understand were the prob comes from
the motors are slighly coghing while i accelerate
I took a video to show you what happen with a full acceleration! 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}