Jakeii
September 19, 2016, 3:43pm
1
Any help would be appreciated!
Iv’e done the correct (afaik) binding procedure, connect to VESC connect binding pins, turn on remote while holding binding button, removing binding jumper.
And then this happens:
https://www.youtube.com/watch?v=OSyPZzpzHfk&feature=youtu.be
pushing forward does nothing, but if I bring it backward then towards the middle the motor goes for it! I have to hold backwards to stop it.
I’ve tried rebooting all bit of kit and rebinding
I hope it’s something obvious I’ve missed because I don’t want to wait for a new remote
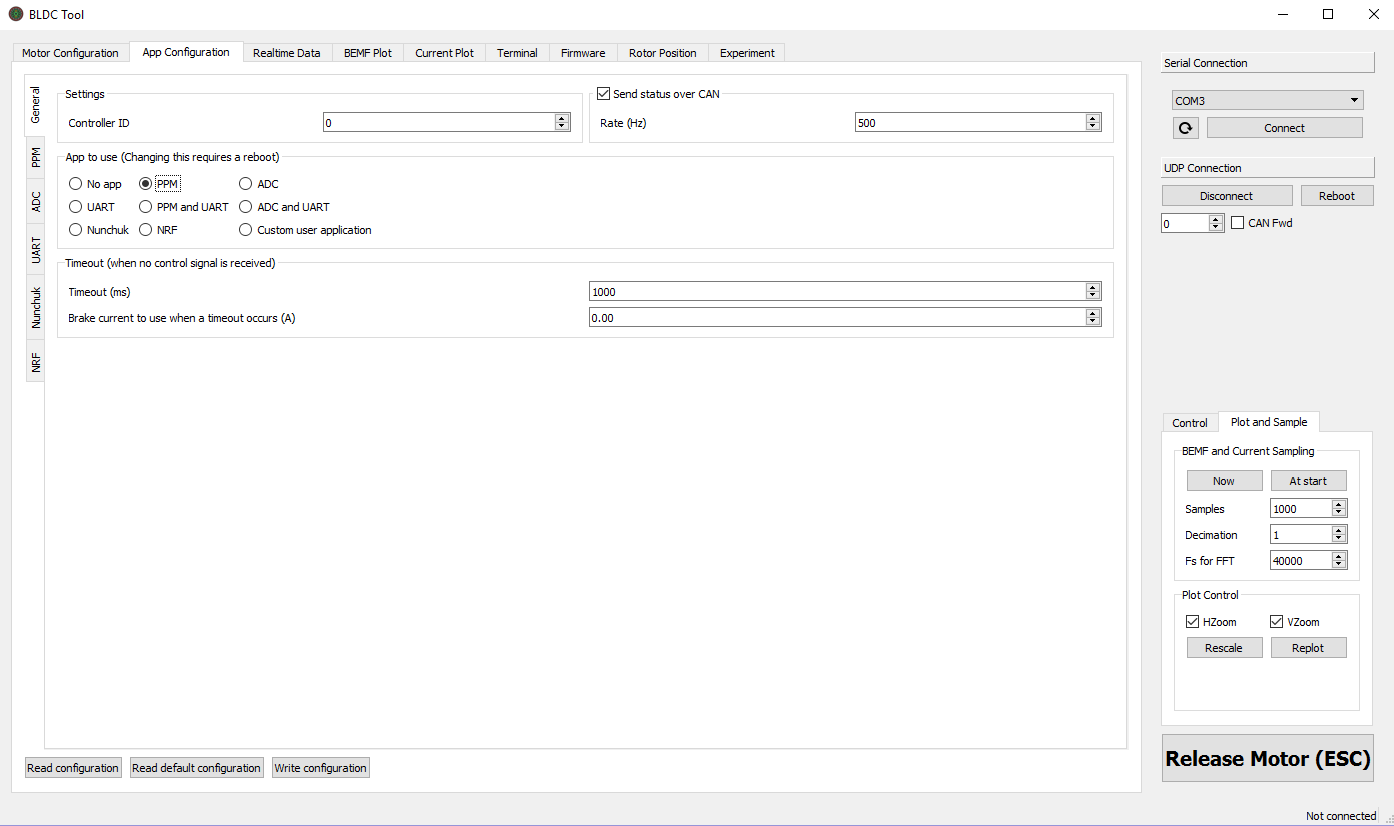
VESC Settings:
did you set your “PULSEWIDTH” using the display ?.. Also have you run motor detection ?
1 Like
Jakeii
September 19, 2016, 3:49pm
4
How do i know what the pulsewidth should be?
Yes, I’ve done motor detection.
thanks!
You need to use the display… It different for every remote, it depend on how the trim is set. Follow the video inside the link I sent you.
1 Like
Jakeii
September 19, 2016, 3:58pm
6
Aha! Watching now, It’s making sense now cheers,
1 Like
Having the same problem but my motor just makes noises and trys to go when getting started from a stop. Any ideas to fix it?
Jakeii
September 21, 2016, 7:02am
8
The video solved my issues, have you watched?
Eckles
December 2, 2016, 5:56pm
9
I have exactly the same problem as Jakeii although after following the videos instructions I still have the same problem, the motor just guns it when I press the brake. Any ideas? has could there be other settings interfering?
gaetjen
December 2, 2016, 9:30pm
10
You can also adjust the throttle when you rotate the screw under the red light. It makes it easier to center your pulsewidth